目次
- ポンプ性能曲線の読み方
- ポンプ流量・電流値とシステム抵抗値の関係
- static head(実揚程)と friction loss(圧力損失)
- ポンプの吸い込み圧(=押し込み圧)と吐き出し圧
- 高いタンクからポンプに押し込む場合
- システム抵抗値
- ポンプの稼動点とバルブの圧力損失
- ポンプ吐き出し口とバルブによる圧損の見方
- バルブ制御が要らないPMポンプという回転数制御
- ポンプの選定方法
- 粘度はポンプの運転にどのように影響するか?
- キャビテーションを防ぐには?
- ポンプの運転で注意することは?(空運転 締め切り運転 異物混入)
- ポンプにおける揚程(m)と圧力(bar/MPa)の違いは何?
- 媒体の密度が変わればポンプ圧力も変わる
- 自給式ポンプと呼び水
- ポンプにインバーターを付けるとなぜ省エネになる?
- 吐出し側バルブ弁とバイパス弁の流量調整の違い
- インペラーサイズと能力の関係
- 媒体の流れやすさ(配管内の流速・動粘度)
- NPSHr(必要吸い込みヘッド)とNPSHa(有効吸い込みヘッド)
- ポンプの回転数・インペラ径と流体の流量/揚程/軸動力/NPSHRの関係
- ポンプの複数台運転のメリット
- システム抵抗値と複数台運転の関係
- ポンプ吸い込み側の考察
- モーター 電流値(A)の計算公式
- モーター消費電力の出し方
- モーターの絶縁耐圧・絶縁試験
- モーターの導通検査・絶縁チェック
- モーターの巻き線抵抗計
- なぜ三相交流モーターが広く使われているのか?
- 防爆について
- IP保護等級について
- ULマーク2種類について
- DC電源(24V)・マグネットポンプ
- モーター極数とトルク
- 単相ACモーターとコンデンサー
- 使用主電源とモーター端子の配線が違う
- モーターの使用電圧範囲
- 単相と三相の違い
- Vaconインバーターの基本動作(ローカル制御:VFDキーパッド上)
- Vaconインバーターのパラメーター説明
目次
- ポンプ性能曲線の読み方
- ポンプ流量・電流値とシステム抵抗値の関係
- static head(実揚程)と friction loss(圧力損失)
- ポンプの吸い込み圧(=押し込み圧)と吐き出し圧
- 高いタンクからポンプに押し込む場合
- システム抵抗値
- ポンプの稼動点とバルブの圧力損失
- ポンプ吐き出し口とバルブによる圧損の見方
- バルブ制御が要らないPMポンプという回転数制御
- ポンプの選定方法
- 粘度はポンプの運転にどのように影響するか?
- キャビテーションを防ぐには?
- ポンプの運転で注意することは?(空運転 締め切り運転 異物混入)
- ポンプにおける揚程(m)と圧力(bar/MPa)の違いは何?
- 媒体の密度が変わればポンプ圧力も変わる
- 自給式ポンプと呼び水
- ポンプにインバーターを付けるとなぜ省エネになる?
- 吐出し側バルブ弁とバイパス弁の流量調整の違い
- インペラーサイズと能力の関係
- 媒体の流れやすさ(配管内の流速・動粘度)
- NPSHr(必要吸い込みヘッド)とNPSHa(有効吸い込みヘッド)
- ポンプの回転数・インペラ径と流体の流量/揚程/軸動力/NPSHRの関係
- ポンプの複数台運転のメリット
- システム抵抗値と複数台運転の関係
- ポンプ吸い込み側の考察
ポンプ性能曲線の読み方
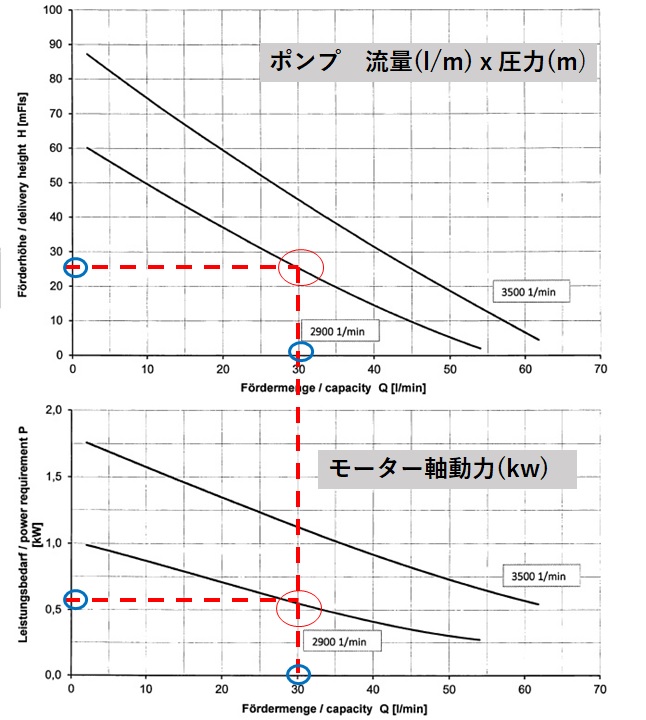
ポンプ性能曲線の見方は、横軸の流量(l/m)と縦軸の圧力(m)で見ていきます。例えば上記のポンプで30l/m時に出せる圧力を見たいとします。その際は横軸の30l/mから縦に伸びる直線とポンプ性能曲線との交点を見ます。縦軸の圧力を見ると約25mの圧力が出せると分かります。曲線が2つあるのは、2900rpm(50Hz時)と3500rpm(60Hz時)があるためです。今回は50Hzでの稼働点を見ています。
またこの時の適切なモーターサイズを見るには、性能曲線下にあるモーター軸動力の表を見ます。30l/m(50Hz)時の圧力はそのまま曲線との交点を見ると、縦軸の軸動力(kw)で約0.55kwと分かります。モーターには0.5kwサイズもありますが、余裕を見て1.0kw以上のモーターを選定したほうがよいでしょう。
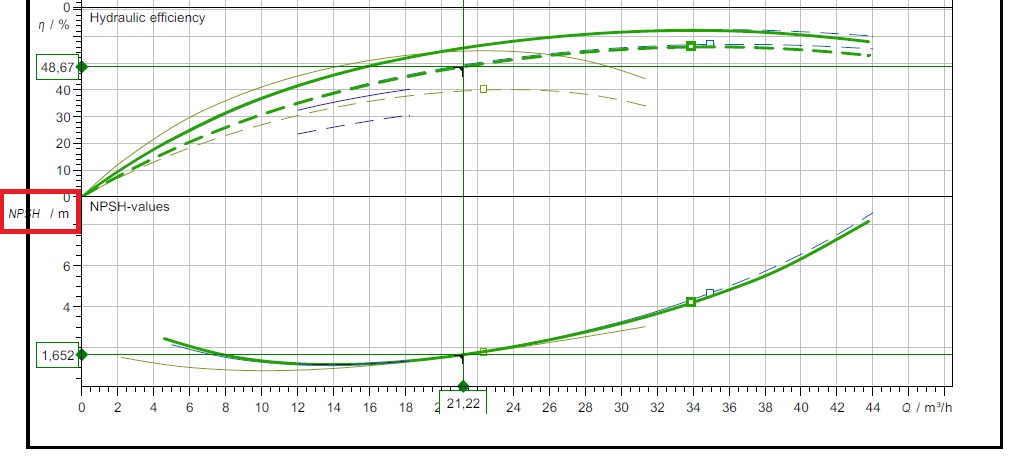
ポンプの性能曲線には、流量と圧力の2つが示されています。詳細なデータでは、その際の軸動力(モーター消費電力)・NPSHR必要吸込みヘッド・ポンプ効率なども記されています。この性能曲線はあくまでポンプ単体が行う仕事を示しています。ポンプの先にあるバルブ弁によって失われる圧力などは含まれていません。ポンプが作り出す圧力、ポンプが送り出す流量がこの性能曲線には記されています。
ただしこの性能曲線だけではポンプの稼働点は決まりません。ポンプの稼働点(圧力・流量)を決めるのは、ポンプの先にあるシステムが持つ抵抗値です。システム抵抗値の曲線との交点により、ポンプの稼働点が1点に決まります。システム内のバルブを閉めることによりシステム抵抗値が上がれば、その曲線は左に寄ります。すると、ポンプの稼働点は流量が下がり、圧力が高くなる交点に移動します。反対にバルブを開放すれば、システム曲線は右に寄り、流量が上がり圧力は下がる交点に移動します。
ポンプの稼働点を決めるのはポンプ自身ではありません。ポンプは常に与えられた回転数で100%で仕事を行うだけです。そのポンプの先のシステム抵抗が、ポンプの稼働点を決定しています。
ポンプ流量・電流値とシステム抵抗値の関係
ここではスペックポンプ主力製品のカスケードインペラータイプのポンプを元に説明します。カスケードタイプのポンプは渦巻型インペラーのポンプとは異なり、流量を上げるほど(バルブを開けるほど)に電流値は下がっていきます。反対にバルブやシステム抵抗値の上昇により流量が絞られるほどに電流値は上がっていきます。

先程も説明しましたが、ポンプのパフォーマンスはポンプ自身が決めるのではなくポンプが組み込まれているシステム回路全体の抵抗値によって決められます。例えば上の図では、バルブや熱交換器を通る配管などがポンプが流そうとする仕事に対しての抵抗になります。バルブや熱交換器などの数が増えるほどに回路全体のシステム抵抗値は上がりますので、その分だけポンプは十分な圧力を持って媒体を送り出さなければ十分な流量を熱交換器などに送りこむことができません。

例えば上のグラフにある黄緑色の曲線が回路のシステム抵抗値を示します。この曲線とポンプの性能曲線である赤い直線(流量と圧力)が交差する点がポンプの稼動点に決まります。ここでは黄色い点の【42 l/m at 22m】というのが稼動点です。そしてその時の電流値は青い直線との交点である【5.3A】付近になります。
そしてシステム抵抗値が増す、つまりバルブや熱交換器が増えたり、配管が細いものになったりL字型エルボが増えたりすると、回路全体のシステム抵抗値は増します。下の図のように黄緑色のシステム抵抗値の曲線は左側へ傾きの強い曲線に変わります。
システム抵抗値が増す要因
・バルブや熱交換器などの流量の抵抗になるものが増える
・配管が細くなる
・L字型のパイプ部分が増える
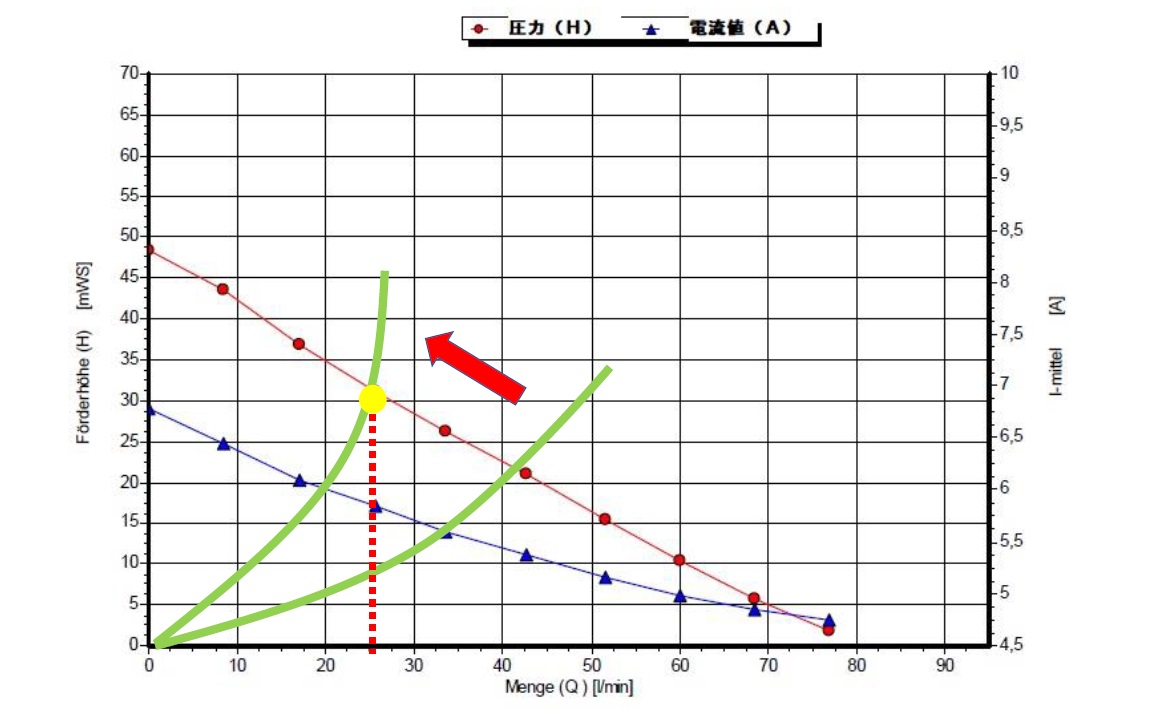
何らかの要因でシステム抵抗値が増すと上の図のように曲線は傾きの強い左側に寄ったものに変わります。ここで注目したいのがポンプの出す流量とその時の電流値の関係です。回路の抵抗が増えたので当然ポンプが媒体を流しにくい状況になっています。
具体的に数値で見るとシステム抵抗曲線と赤いポンプ性能曲線が交わる黄色い点がポンプの稼動点になり、【25l/m at 30m】になります。先程と同じ回転数のポンプであるにも関わらず、【42 l/m at 22m】→【25l/m at 30m】へと流量は減りました。(圧力は抵抗が増えたぶん上がっています。) その時の電流値は【5.6A】です。システム抵抗が上がる前は5.3Aでしたので、電流値もシステム抵抗値の上昇と共に上がっています。つまり、回路全体がポンプにとって媒体を流しにくい状態に変わったのでポンプが出す流量は減り、またその時の電流値は上がったのです。
実際の現場ではシステム回路に流量計のみを取り付ける場合が多いですが(圧力計は付けないケース)、流量とその時の電流値のデータを取る事ができれば、そこから大体のポンプが出す圧力を求める事が可能です。
流量計も圧力計も取り付けていないというケースではあまり正確ではありませんがポンプの性能曲線と稼動中のポンプの電流値を取る事ができればその時の大体のポンプの稼動点(流量と圧力)を性能曲線から予測することもできます。
電流値が定格ギリギリの値になっているとするならば、システム抵抗値とポンプ性能曲線の交点がかなり左側に寄っているという事ですので、流量はかなり絞られていると考えられます。またポンプの仕事量がかなり大きい状態とも言えます。システムの抵抗値がかなり大きい状態です。
反対にその時の電流値が低い状態を示しているならば、交点は右側に寄っているという事ですので、流量は十分に出ていると考えられます。ポンプの仕事量は適正と言えるでしょう。システム抵抗値も小さい状態です。
しかしケースによっては電流値だけを見て判断を誤ってしまう事もあります。
例えばポンプ内に異物が挟まっている場合、モーターへの負荷は高くなり電流値はかなり上がっているでしょう。これはシステム抵抗値が大きいのではなくポンプ自体に問題がある状態です。反対に電流値が極端に低い場合にポンプの流量はかなり出ていると考えたいですが、空運転というインペラ部に流体がない状態、流体に空気が混じっている状態では電流値は低い状態になります。この状態のときには流量は出ていませんので電流値だけで判断することができません。
ここではあくまでカスケードタイプでのインペラーの説明です。渦巻型インペラーの場合は消費電力の動きが反対になりますので注意してください。
カスケードインペラー(圧力型):流量が絞られるほどに消費電力(電流値)は上がっていく。そのためスタート時はバルブ全開にして消費電力を抑えてスタートさせる。
渦巻きインペラー(流量型):流量が出る程に消費電力(電流値)は上がっていく。そのためスタート時はバルブを絞る閉塞運転で消費電力を抑えてスタートさせる。
なぜこのような違いが起きるのかと言うと、カスケードインペラータイプはその構造上、密閉された圧力がどんどん上がるような構造になっています。反対に渦巻型インペラーはケーシング内は開通しており圧力よりも流量が多く出るための構造になっています。
static head(実揚程)と friction loss(圧力損失)
揚程とはポンプが水を高さ何mまで持ち上げられるかの能力を示したものです。
揚程の他にポンプの能力には流量、どれだけの量の水を移送できるかがあります。
揚程(圧力)と流量の2つを合わせてポンプの能力になります。
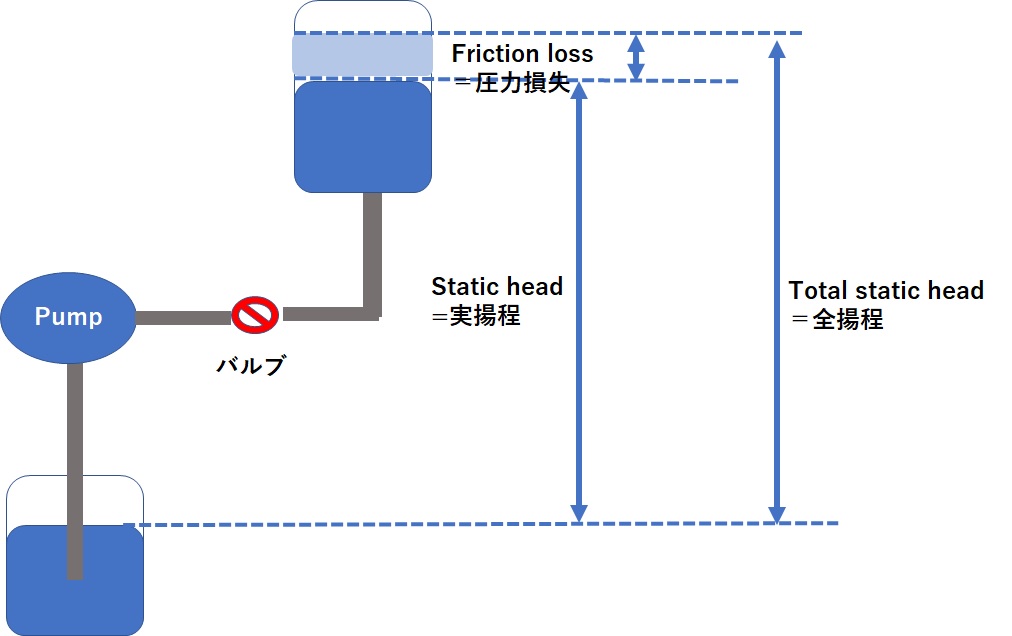
実揚程とはそのポンプが高さ何mまで水を持ち上げられるかを表します。実際には配管のバルブやエルボなどにより圧力は損失するので、その損失分を含めたポンプの圧力を全揚程と言います。
ポンプの吸い込み圧(=押し込み圧)と吐き出し圧
ポンプには吸い込み側に掛かる圧力である吸い込み圧と吐き出し側に掛かる圧力である吐き出し圧があります。この吸い込み圧と吐き出し圧の差はポンプ差圧と呼ばれてそのポンプ固体がまさに生み出す圧力になります。
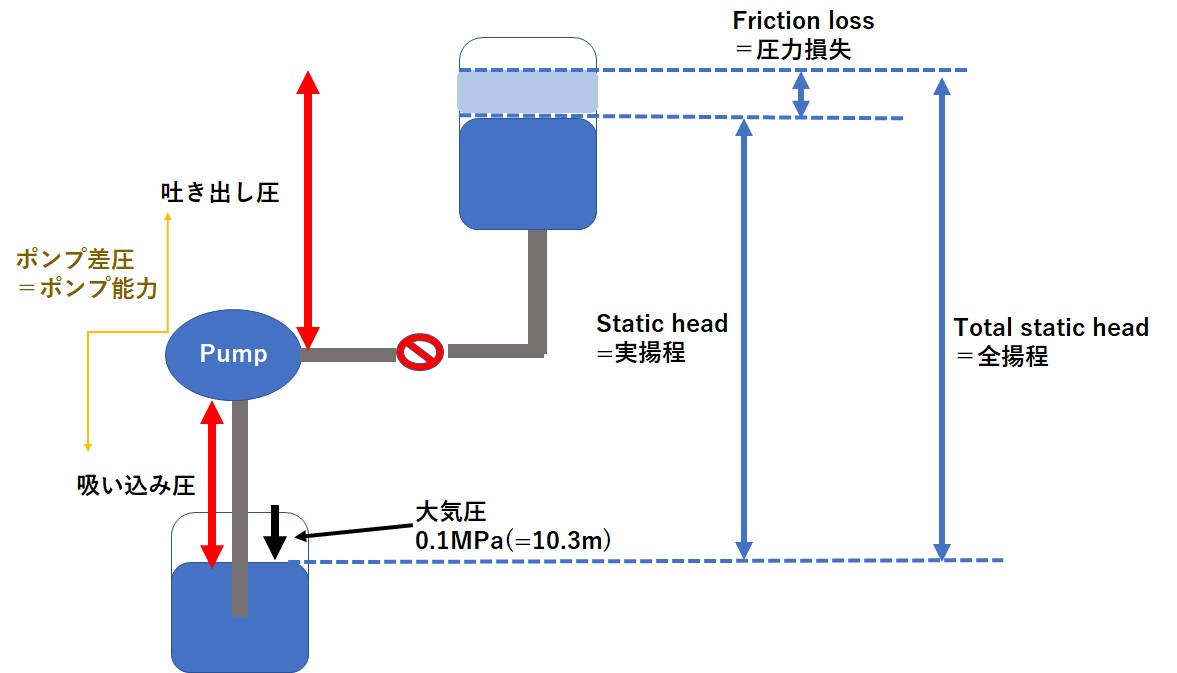
注目すべきはポンプ吸い込み側の圧力の方で、ポンプは十分に吸い込み側の圧力と配管コンディションを確保しないと十分に能力を発揮できません。この吸い込み圧は図のような吸い上げの場合は、ほぼ大気圧(0.1MPa=10.3m)によって賄われます。この大気圧がポンプに押し込む押し込み圧となるのです。
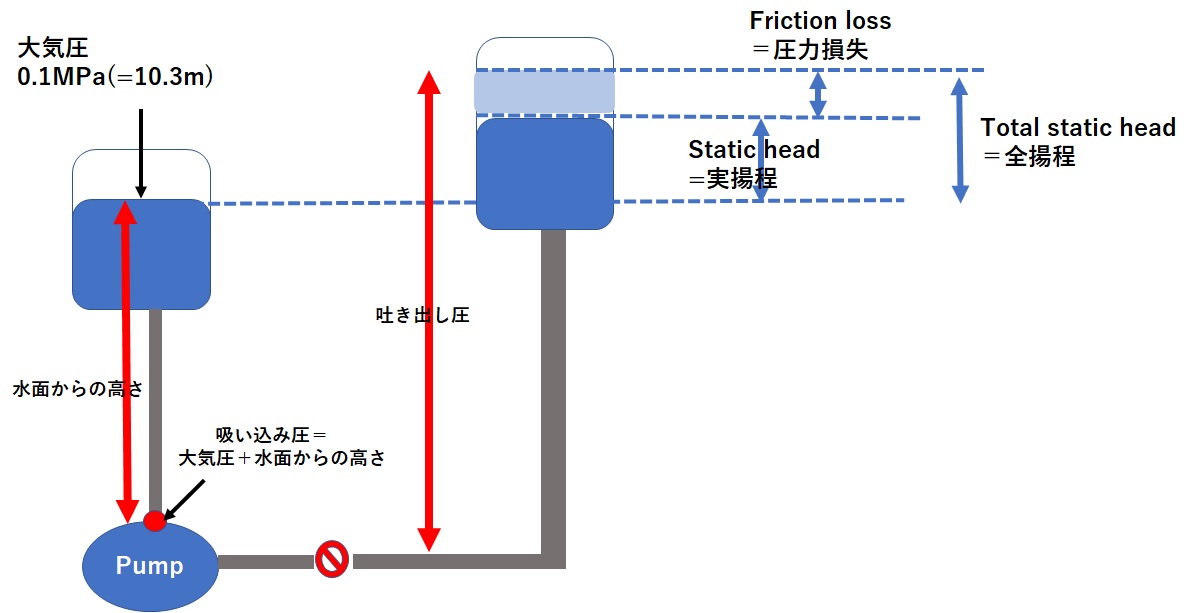
高いタンクからポンプに押し込む場合
チラーなどの装置ではポンプは高い位置にあるタンクから媒体を押し込まれる場合が多いです。
この場合、ポンプの吸い込み圧は図のような開放タンクであれば、大気圧とタンク水面からの高さの足したものになります。
システム抵抗値
配管システムにおいて実揚程(static head)が一定の場合、流量が大きくなるほど圧力損失(head loss)も大きくなります。
下記の図は流量の変化における配管システムの全揚程の曲線です。
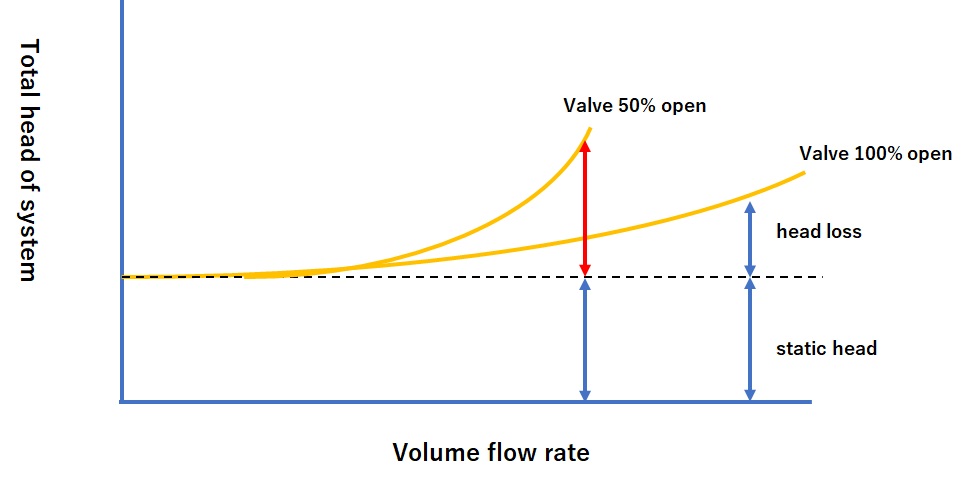
配管システムの全揚程が流量の増加と共に上がるほど、流量と共に増える圧力損失(head loss)に対してポンプの実揚程(static head)の割合は減っていきます。
配管システム抵抗の曲線はバルブの開放度により影響されます。バルブを開放するほど平らに寝そべった曲線になり(バルブ100%)、バルブを絞るほど、傾斜の強い曲線(バルブ 50%)になります。
ポンプの稼動点とバルブの圧力損失
ポンプの運転中の稼動点は
システム抵抗曲線とポンプ性能曲線の2点による交点によって決まります。
バルブを絞れば(100%→50%)、システム抵抗曲線は傾斜が強くなるのでポンプの稼動点となる交点も左に移動します。ポンプ稼動点の流量は少なくなり、圧力は高くなります。またバルブを絞るほど、バルブ通過時の圧力損失も大きくなります。
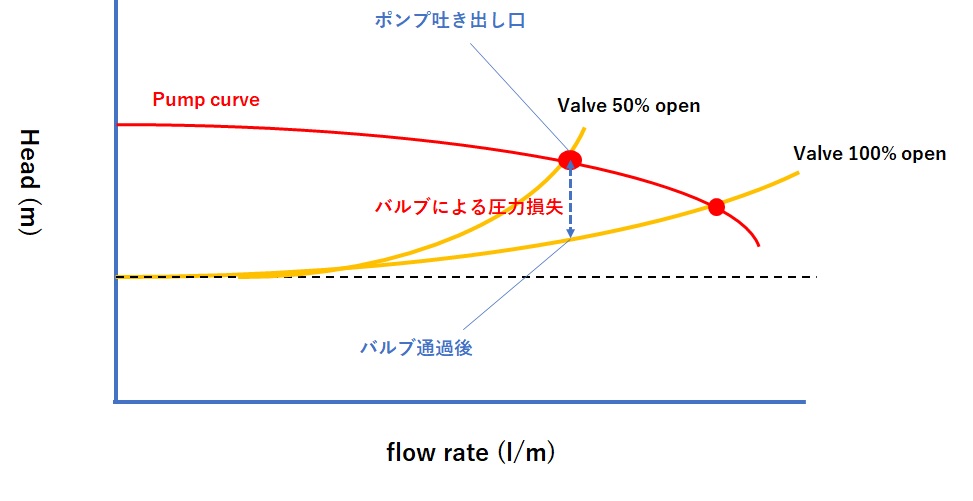
ポンプ吐き出し口とバルブによる圧損の見方

ポンプの性能曲線はあくまでポンプ吐き出し口における能力を示しています。ポンプ吐き出し口の能力とはそのポンプが生み出す差圧と送り出している流量の事です。従来のポンプの能力制御はポンプ吐き出し口の後に付けるバルブ開閉による調整が主流でした。
しかしバルブを通過する際にポンプから送り出される圧力は損失しています。これは性能曲線の見方についても同じで、システム抵抗曲線とポンプ性能曲線との交点はあくまでポンプ吐き出し口の能力になります。実際の回路ではバルブ通過後の流量や圧力が重要になってきますので、下図の性能曲線の青い交点つまりポンプ吐き出し口の能力だけを見ても不十分になります。

上記の性能曲線で見るとバルブ通過後の圧力は赤い点になります。バルブで流量を絞るとここまで液体に与えられる圧力は落ちるのです。
このバルブによる失われた圧力損失分が無駄に消費されてしまったエネルギー分と言えます。この無駄に消費されたエネルギーはそのままポンプ消費電力の浪費となります。
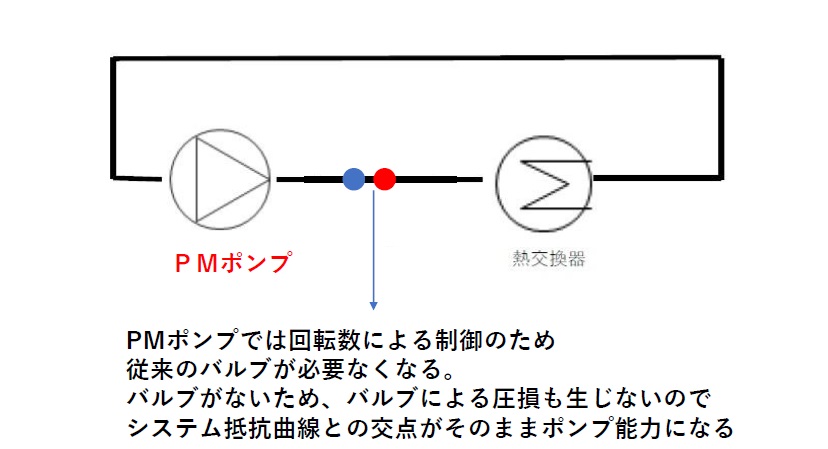
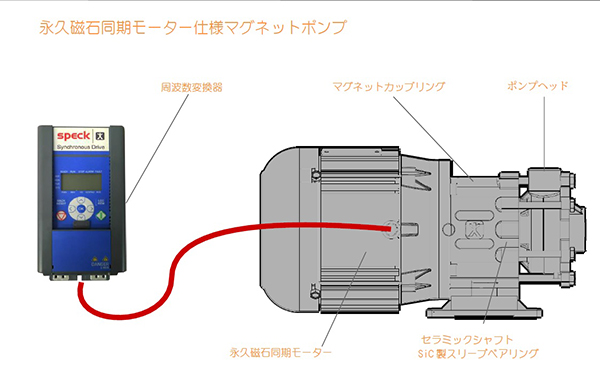
バルブ制御が要らないPMポンプという回転数制御
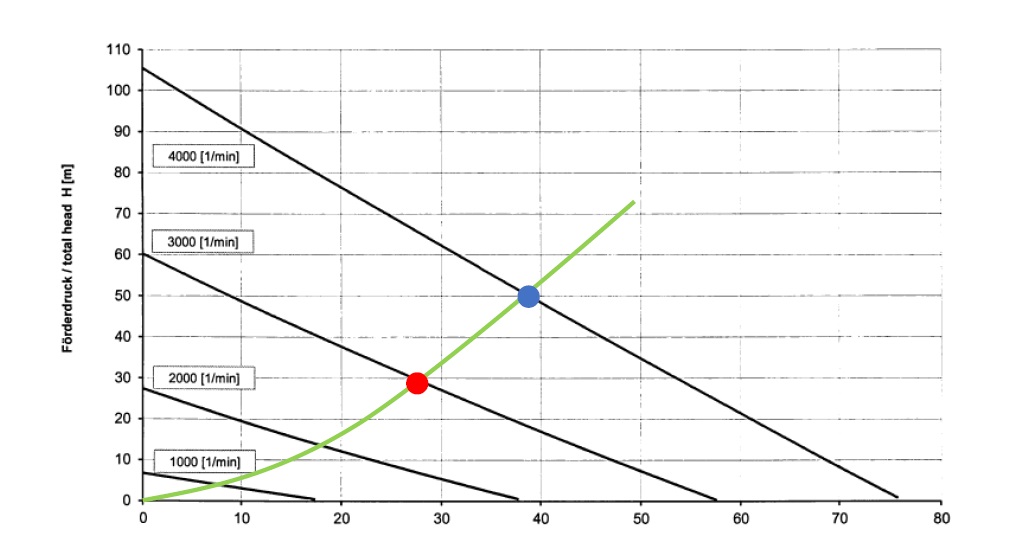
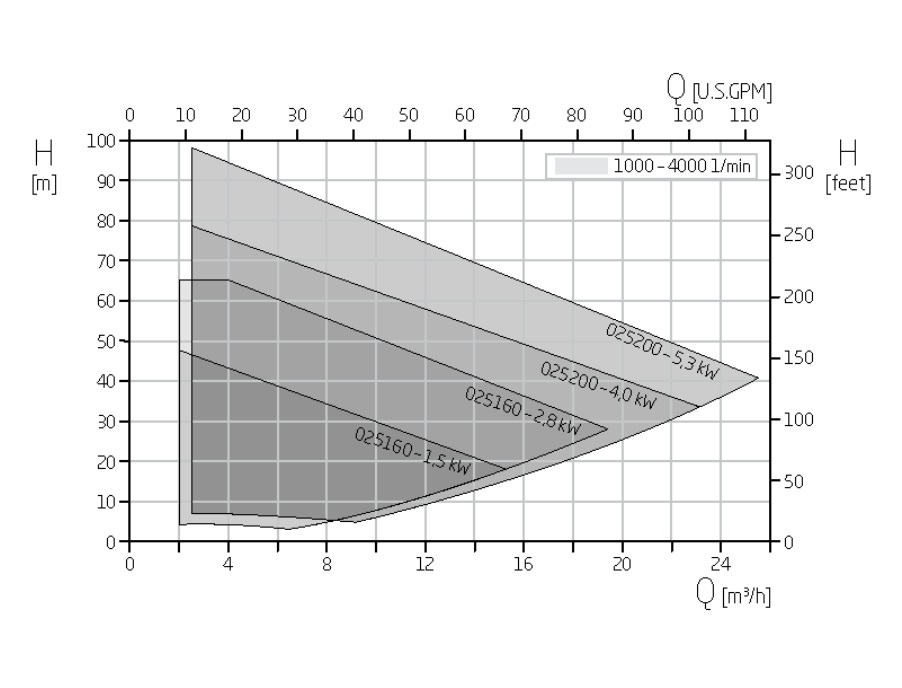
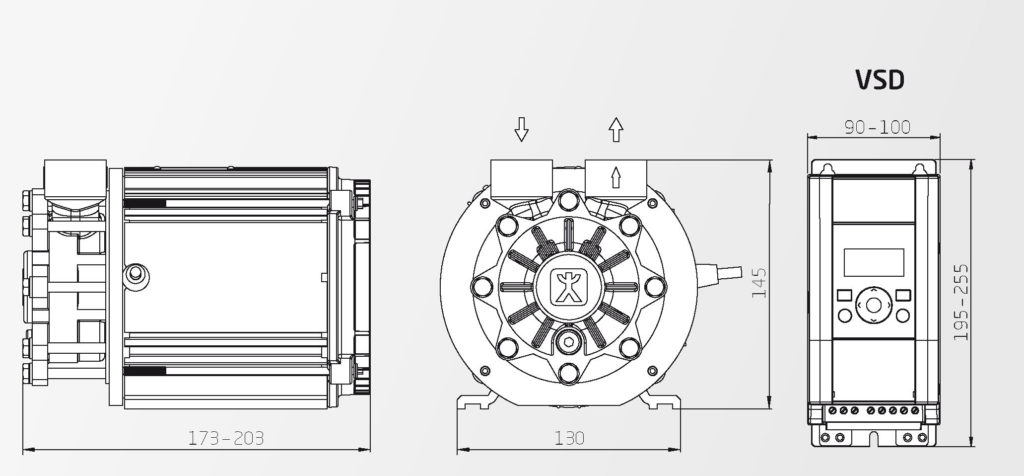
スペックポンプにはPMポンプというVFD駆動タイプのポンプがあります。
回転数を1000~4000回転に自由に変える事で幅広い能力をカバーできる省エネにも適したポンプです。幅広い回転数でポンプを運転できるという事はこれまでのようなバルブによる制御が要らなくなるという事でもあります。つまりこれまでのバルブによる圧力損失がPMポンプのような回転数制御のポンプの場合には起きなくなるのです。
上記の曲線はPMポンプの1000~4000回転の曲線を示しています。黄緑色のシステム抵抗曲線との交点は最大能力になる4000回転時には青い点になり、もう少し流量を落としたい場合はバルブを絞る代わりに3000回転まで落とし赤い点にします。この時にはバルブがないためにバルブによる圧力損失は起きていません。バルブによりエネルギーロスが起きないため、PMポンプの消費電力は常に必要最小に留めておくことが可能になります。
ポンプの選定方法
ポンプを選定するには、使用電源(例えば200V 50Hz)、使用媒体(水、油、ガルデンなど)、使用温度(-40℃~100℃など)、稼動点(30l/m at 30m など)が必要な情報となります。このほかにもインバーターの使用などの情報があれば、より最適なポンプを選定できます。
- 使用電源(〇V 〇Hz)
- 使用媒体
- 使用温度帯
- 媒体の密度・粘度
- 稼働点(〇l/m at 〇m)
- インバーター使用の有無
粘度はポンプの運転にどのように影響するか?
媒体が水の場合は、20℃であっても80℃であっても、水の粘度はほぼ変わりません。しかし媒体が熱媒循環油や不凍液(LLC)になりますと、低温の状態では粘度が非常に高くなる場合があります。媒体の粘度が高いということは、それを回すマグネットポンプの軸動力にも大きな負担が掛かるという事ですから、粘度が高い状態(媒体温度が低い状態でスタートするコールドスタート時)にはモーターサイズの容量に注意する必要があります。
具体的には通常の選定よりも、粘度分だけモーター容量を大きくしたり、媒体が十分に温まり、粘度が低くなってから運転を開始するなどです。また粘度が高くなると、ポンプの流量や圧力にも影響してきますので注意が必要です。反対に媒体粘度が0.5mm2/s 以下などの非常に低い値の時にも、ポンプの運転に影響しますので注意する必要があります。
キャビテーションを防ぐには?
媒体の沸騰現象であるキャビテーションを防ぐには、ポンプ側からのアプローチとシステム配管側からのアプローチの2つがあります。
ポンプ側から考えますと、まずポンプ固有の値であるNPSHR必要吸込みヘッド(ポンプ内で減少する圧力)の値が低いポンプを選定することです。NPSHRが元々低いポンプであれば。ポンプ内の圧力減少も少ないのでキャビテーションは起こりにくくなります。または渦巻きポンプなどは特に、性能曲線の右端でポンプを使うとNPSHRが急激に高くなります。大流量を出したいからと言って、ポンプ能力ぎりぎりの最大流量で使うと、キャビテーションは起こりやすくなるので、余裕を持ったポンプの選定が必要です。
配管側から考えますと、ポンプへの押し込圧(NPSHA)を高くすれば、ポンプ内で失われる圧力をカバーすることができ媒体の飽和蒸気圧以上に保つことができます。具体的にはポンプ吸い込み側に入るタンクの高さを上げて押し込み圧を上げたり、吸い込み側の配管径を大きくして圧力損失を少なくしたりなどです。
キャビテーションとはポンプ内の圧力が低下することにより起こる媒体の沸騰現象(液体からガスへ)の事です。キャビテーションにより発生した気泡により、インペラーに繰り返し水撃作用を及ぼし、ポンプの能力を低下させます。インペラーの他にメカニカルシールやベアリングなどにもダメージを与えます。
キャビテーションの他に締め切り運転というものがあります。締め切り運転は吐き出し側のバルブを閉めて運転してしまう事で、ポンプヘッド内にはわずかな水量が同じ箇所をグルグルと回転しまう状況です。水温は短時間で上昇し、ガスケットやメカニカルシールなどのシール部やポンプ本体の寿命を下げる原因になります。
【キャビテーションの見分け方】
キャビテーションのメジャーな見分け方は、音と振動です。パチパチと言うような音がすればキャビテーションの可能性があります。水蒸気が破裂したような音や、ポンプの振動が激しくなるような現象が見られます。
【キャビテーションの防ぎ方】
・ポンプ本体を水源のタンクに近づける
・配管を清掃し、詰まりをなくす
・吸い込み側の配管の直径を増やし、吸い込み側の水流速度を下げる
ポンプの運転で注意することは?(空運転 締め切り運転 異物混入)
ポンプの運転で特に気を付けたい点は以下です。
①空運転・・・ポンプ内に媒体が入っていない状態でポンプを回してしまうこと。媒体がない空の状態で回されたポンプ内部は急激に温度上昇し故障の原因になります。ポンプ内に確実に媒体が満たされているか確認の上でポンプをスタートさせてください。
②締め切り運転・・カスケードポンプでは吐出し弁を閉め切った状態(流量が0に近い点)で運転しますと、圧力が急激に高まり、ポンプ内部の温度、媒体温度が上昇し、ポンプ故障の原因になります。またモーター過負荷の原因にもなりますので、短時間でも締め切り運転はしないようにします。
③異物混入・・ポンプヘッド内に媒体以外の固形物が入ってしまうと、インペラーなどの部品を損傷させる原因になります。吸い込み側にストレーナを付けるなどして、ポンプ内に異物が混入しない状態を作ることが重要です。
④吐き出し側でバルブ調整を行う事・・吸い込み側でバルブ調整を行うと、ポンプ内の圧力が急激に下がるためキャビテーションを引き起きしやすくなります。バルブ調整は必ず、吐き出し側のバルブ弁で行います。
⑤ポンプのちょい回し・・スタート時はポンプの回転方向。異音または振動がないかをチェックするために、ポンプを少しだけ回してみる事で確認をする
ポンプにおける揚程(m)と圧力(bar/MPa)の違いは何?
そのポンプが水を何mの高さまで持ち上げることのできるかを示す値が揚程(m)です。揚程30mのポンプと言えば、水を30mの高さまで持ち上げる事のできるポンプです。ではポンプにおける圧力(bar/MPa)とは何でしょうか? これは圧力なので、単位面積あたりにかかる力です。水で揚程10mの仕事をするポンプは、0.1MPaの圧力を生み出すポンプと同じです。これは1barの圧力を生み出すポンプとも言えます。
ではポンプが送り出す媒体が、水(密度 1.0g/cm3) から 油 (密度 0.8g/cm3)に変わった場合はどうでしょうか。密度は単位体積あたりの重さを示す値ですので、油は水よりも軽い媒体と言えます。その油を10m持ち上げるのと、水を10m持ち上げるには、同じ10mでも掛かる圧力が異なります。ポンプは常に100%の力で回転していますので、重さの違う水も油も等しく10m持ち上げようとします。結果的に10mの高さまで持ち上げますが、同じポンプで考えると、その時に掛かる圧力は水0.1MPaに対し、油は0.08MPaしかありません。密度が少ない油を送り出しているからです。またその時のモーター軸動力も、ポンプは水より軽い油を持ち上げているので、水に掛かる消費電力の0.8倍に減っています。逆に1.8g/cm3などの密度の大きいフッ素系媒体などを送り出すときは、フッ素系媒体1.8MPaの大きな圧力が掛かります。重い媒体を送り出しているからです。その時の軸動力も1.8倍に上がっています。
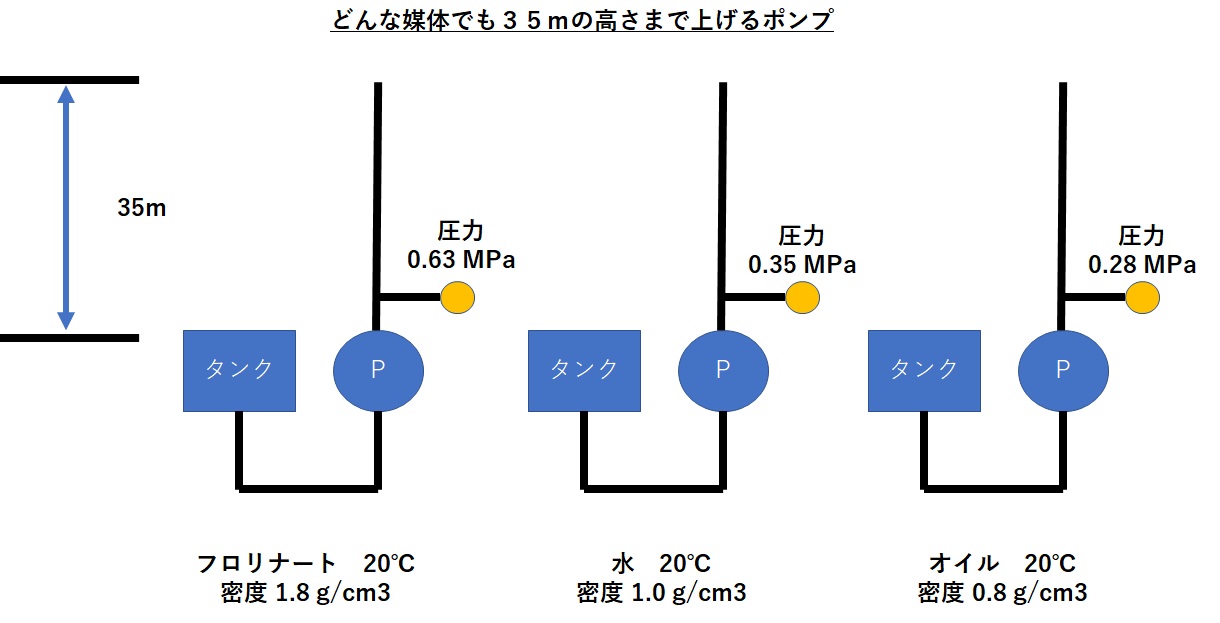
媒体の密度が変わればポンプ圧力も変わる
多くのポンプのトラブルは、全ての媒体はどれも同じであるという誤解から生じています。どんな媒体で何度で使用し、その時の密度と動粘度はどの位かは必ず聞かなくてはなりません。密度が増えれば、ポンプが吐き出す媒体圧力は高まり、モーターの軸動力も上がります。
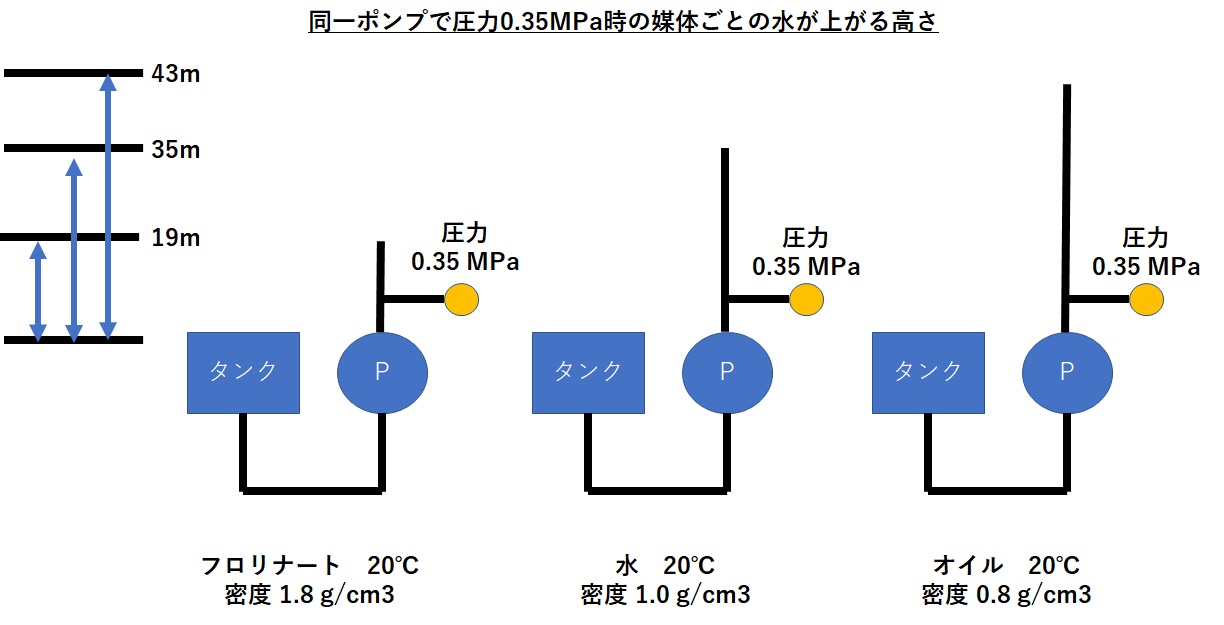
同じ圧力0.35MPaを示す同一のポンプがあるとします。媒体はそれぞれ密度の重いフロリナート、水、密度の低いオイル系とした場合、最も媒体の高さが上がるのは密度の軽いオイル系(=43m)で次に水(=35m)、最後に密度の重いフロリナート(=19m)になります。
自給式ポンプと呼び水
通常ポンプの始動時には、呼び水と呼ばれるポンプ自身と接続された配管内全てに使用する媒体で満たします。呼び水をする事でポンプや吸込みの空気が追い出され、下の位置にあるタンクからの媒体を汲むことができるようになります。押し込み運転のようなポンプがタンクより下方にあるような回路では、タンクに液体が入ればポンプ本体と配管は液体で満たされますが、ポンプよりも下にあるような媒体を汲みこむ際にはこの呼び水が必要です。
自給式ポンプと呼ばれるポンプはポンプ本体に呼び水するだけで揚水してくれます。非自給式ポンプには自給能力はなく、吸い込み管の先にフート弁を付けて、ポンプ本体のみならずタンクに繋がる吸い込み配管全てに呼び水をする必要があります。
ポンプにインバーターを付けるとなぜ省エネになる?
ポンプは常に決められた回転数で100%で動き続けています。ですので、同じ稼働点を出しながらもポンプの消費電力をセーブするには回転数を下げるしかありません。
通常のバルブ開閉による流量調整では、媒体がバルブ弁を通過する際に圧力損失を伴います。これがポンプ効率のロスになります。これをインバーターによる回転数調整に変えると、バルブで起こる圧力損失が無くなります。ですので回転数を既存値より下げても、達成したい稼働点を出すこともできます。これによりポンプの省エネが達成できるのです。
吐出し側バルブ弁とバイパス弁の流量調整の違い
求めている稼働点に向けて吐出し側のバルブ弁を絞ると、モーター過負荷になってしまうようなポンプの場合、バイパス弁を開放して再び媒体を吸い込み側に戻す事で、モーターの過負荷を防ぐことができます。
低流量・高圧の稼働点で過負荷になるようなカスケードポンプでは、吐出し側のバルブ弁は負荷が掛からない大流量のポイントで開放しながらポンプを動かし、バイパス弁を開けて逃がす事で流量を下げます。バルブ弁では流量を下げれば消費電力が上がりますが、バイパス弁はポンプ自体の仕事量は一定のまま、バイパス配管を使う事で、過負荷にならないように流量を下げる事ができます。
インペラーサイズと能力の関係
ポンプの能力を変える際に、インペラーカットという方法があります。インペラーサイズを小さくすることで、適正なポンプ能力に落とす方法です。
インペラーの直径は圧力、インペラーの幅は流量に影響します。この2つを調整する事でポンプの能力を決定します。インペラーカットはポンプの回転数を下げるのと同じ効果がありますが、現在ではインバーターの回転数調整がより普及しつつあります。
媒体の流れやすさ(配管内の流速・動粘度)
ポンプの選定と同時に大切な事として、流体がちゃんと流れるかという問題があります。例えば、流量がとても大きい(500l/m以上など)、流体の粘度が比較的高い(50mm2/s以上など)、これらの条件がある場合、ケースによっては流体が思うように流れない場合があります。
流す流量が大きい(500 l/m以上など)
配管内を流れる流体の流速として、ポンプが送る流量が大きくなるほど流速は増します。また、配管の呼び系が小さいほど流速は増します。これらの大量の流体を早い流速でしっかりと流せる太い配管系を持っているならば問題ありませんが、配管系が小さい場合、流体を十分に送ることができません。この場合、流す流量自体を絞って落とすか、配管系を一回り大きくして流速を落とすかになります。
粘度が高い
流す流体の粘度が高い場合も、流体が流れにくくなります。この場合、低温で粘度が高くなる媒体の場合は、流体を温めて高温にすることで粘度を低くすることができ、流体も流れやすくなります。
NPSHr(必要吸い込みヘッド)とNPSHa(有効吸い込みヘッド)
ポンプにはNPSH(吸い込みヘッド)という大事な指標があります。そしてそのNPSHには①ポンプ本体側のNPSHr(必要吸い込みヘッド)と②配管側のシステムで決められるNPSHa(有効吸い込みヘッド)の2つに分けられます。
①NPSHr(必要吸い込みヘッド)
NPSHrはポンプ固有で持つ値です。この値は、”ポンプに最低でもこれだけの吸い込み圧力がないと、ポンプがキャビテーションを起こしたり、騒音や振動を起こしたりします”という指標の値です。配管の形状によっては、ポンプに対して押し込める圧力も限られてきますので(例えばタンクの位置をどこまでも高く設置できるわけではない)、このNPSHrの値は小さければ小さいほど優れたポンプという事になります。
NPSHrは、ポンプの流量が大きくなるほど、またポンプの回転数が高くなるほど大きくなります。(NPSHrはポンプ回転数の2乗に比例して大きくなります。)ですので、ポンプの最大能力で運転したいと思い、最高回転数でバルブ全開のような運転をしますとNPSHrは大きくなり、キャビテーションを起こしやすくなり、結果的にポンプのパフォーマンスが発揮されません。NPSHrを考慮した余裕のあるポンプ選定が大事になってきます。
②NPSHa(有効吸い込みヘッド)
NPSHaは配管側・システム側で決定される吸い込み圧力の値です。例えば、ポンプに押し込むタンクの位置がポンプよりも10m高い位置にあれば、10m分だけポンプの吸い込み圧力であるNPSHaが大きくなることを指します。現実的にタンク位置を10mも上に設置することは簡単ではありませんので、上記で書いたNPSHrを出来るだけ低く抑えるという事が大事になってきますが、配管側でできるだけNPSHaを大きくして稼ぐことも、ポンプの正常な運転にとっては大事になってきます。
ポンプの回転数・インペラ径と流体の流量/揚程/軸動力/NPSHRの関係
ポンプの回転数・インペラの直径・液体の比重はそれぞれ流れる媒体の流量・圧力・NPSHR そしてモーターの軸動力(kw)に関わってきます。
例えば、ポンプの最高能力を出すために最高回転数でポンプを回し、吐き出しバルブを全開にしようとするケースがありますが、ポンプの回転数が増せばキャビテーションに関係するNPSHRは二乗に比例し、また吐き出し流量が増すほどNPSHRは増し、キャビテーションが起きやすくなります。この問題を解決するためには、インペラー直径を増すことで流量と揚程が増しますので、インペラー系を大きくしながら回転数を抑えることでNPSHRを抑えるという方法が取れます。
ポンプの回転数が増える
流量 比例
揚程 二乗に比例
軸動力 3乗に比例
NPSHR 二乗に比例
インペラ径が増える
流量 比例
揚程 二乗に比例
軸動力 3乗に比例
NPSHR 関係なし
液比重(g/cm3)が大きくなる
流量 関係なし
揚程 関係なし
軸動力 比例
NPSHR 関係なし
ポンプの複数台運転のメリット
1台の大型ポンプで運転するよりも、複数の小型ポンプを連動させて運転した方がコスト的にもメリットがある場合があります。1台のポンプで高流量・高圧力を賄おうとすると、それ専用の特別なポンプを使用する事になり複数の小型ポンプを使用した方が安く上がる場合があります。
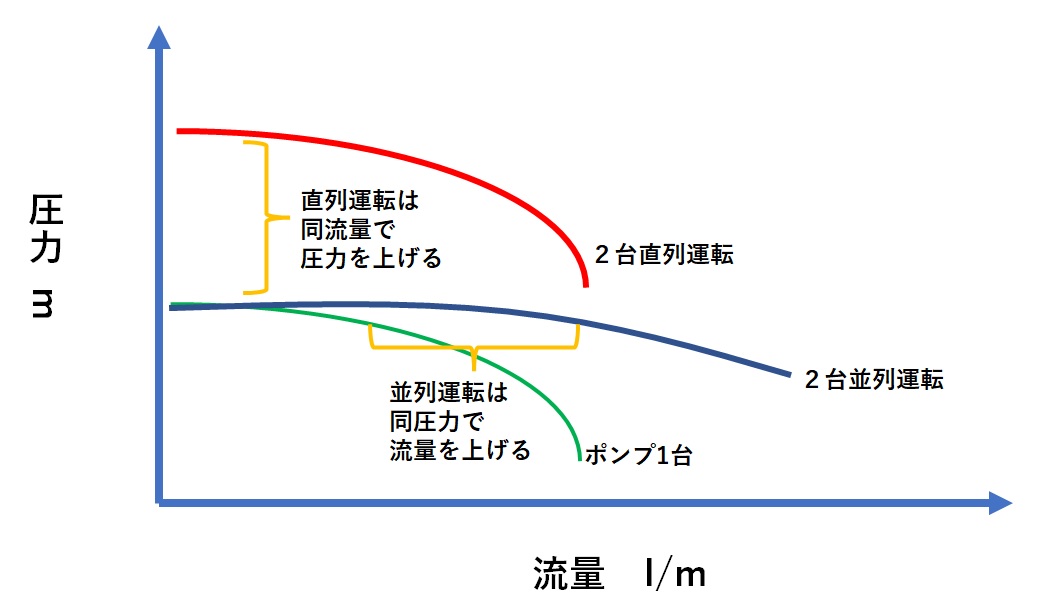
直列運転では、それぞれのポンプを同流量流れることでそれぞれのポンプの圧力が加算されます。並列運転ではそれぞれのポンプが同圧力の際に最も効率的に合計の流量の増加に貢献してくれます。サイズの異なるポンプを並列運転で使用すると、この圧力差の問題が生じやすくなるため運転に問題がでる事があります。
システム抵抗値と複数台運転の関係
1台からポンプを追加していけば合計の流量は上がりますがその上がり方はシステム抵抗値に寄ります。
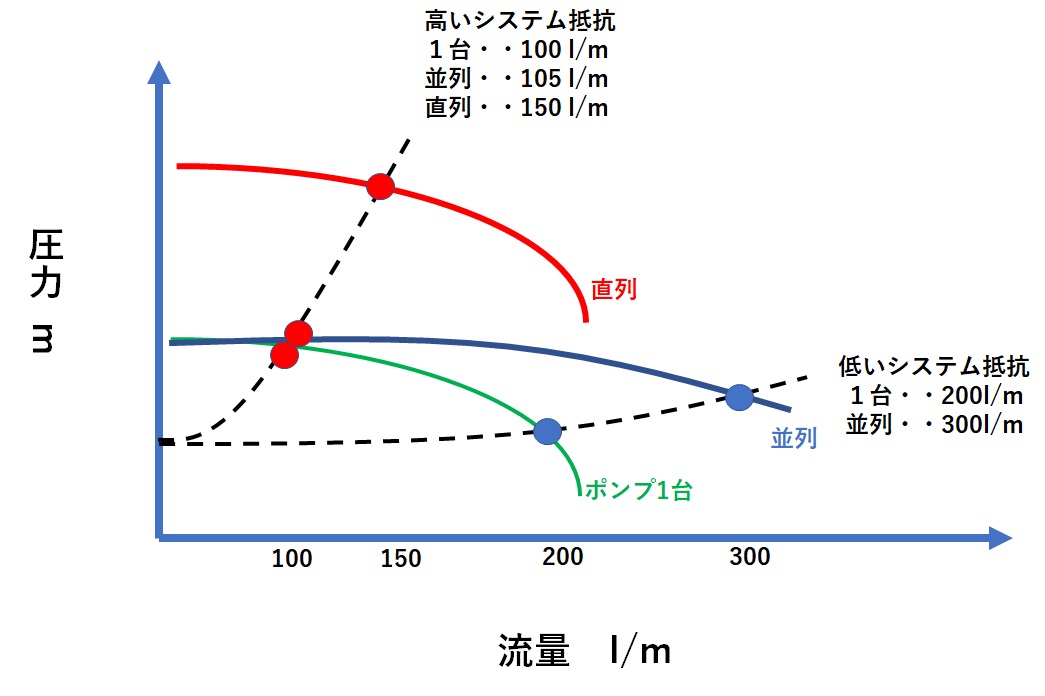
バルブ全開などのシステム抵抗値が少ないフラットな曲線ではポンプを直列運転するよりも、並列運転の方が流量は上がります。逆にバルブが絞られているシステム抵抗値が高い傾斜のある曲線では直列運転がより高い流量で高圧力を出してくれます。システム抵抗値が高い配管の場合、並列運転では1台のポンプと2台並列運転でほとんど流量が変わらないこともあります。
ポンプ吸い込み側の考察
多くのポンプの配管システムの問題は吸い込み側に集中しています。
ポンプは液体を吸い込みませんので、システム全体で液体がポンプ内部のインペラーまで到達させる必要があります。吸い込み側の配管に問題があると、液体がうまくポンプ内部に引き入れる事ができません。ここでは理想的なポンプの吸い込み側配管について見ていきます。
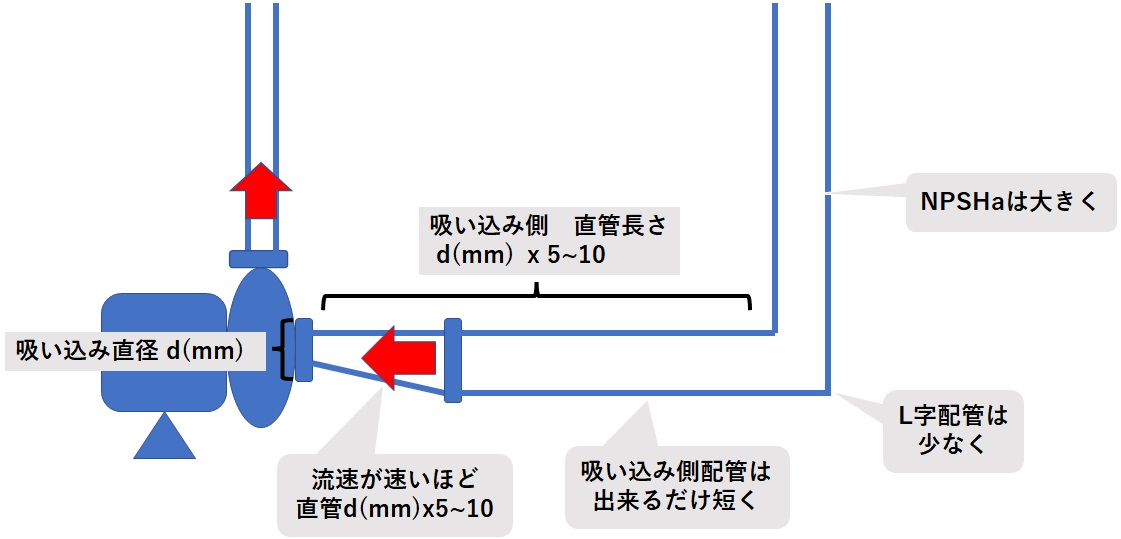
①吸い込み側の直管はポンプ吸い込み系d(mm)の5~10倍は取る
吸い込み側の直管長さをポンプ吸い込み系d(mm)の5 から10倍取る理由はポンプに流れ込む液体の流れを整えるためです。この長さが短いと流れに乱れが出来るため、うまくインペラーに液体が流れ込みません。
②吸い込み側の直管は出来るだけ短く
①と矛盾するようですが、吸い込み側の直管系はそれでもシステム抵抗値の観点から出来るだけ短く取ることが理想です。
③L字配管は出来るだけ少なく
L字配管やバルブはシステムの抵抗値を増やす要因になります。これは⑤NPSHa(有効吸い込みヘッド)を減らす要因にもなります。
目次
モーター 電流値(A)の計算公式
モーターの電流値の計算方法は下記になります。
電流値(A)= 1.1kw(モーターサイズ)x1000 / √3 x 200V(使用電源) x 0.9(モーター力率)x 0.9(モーター効率)
※モーター力率とは誘導モーターのすべり(スリップ)のこと。スリップが増えれば力率は下がる(0.7など)。すると電流値(A)は上がってしまう。
※モーター効率も0.7などに下がれば、その分だけ電流値は上がってしまう。
モーター消費電力の出し方
モーターの消費電力(kw)の計算方法は下記になります。
BHP(kw)= Q (m3/h) x H(m) x 密度 x 0.2724 / EPP(%): ポンプ効率
BHP(kw)= 水の仕事量(※m3/h 換算)/ ポンプ効率
※H(m)= differentilal head ポンプ差圧
※EPP(%) = ポンプ効率↑ 消費電力下がる
ポンプ効率↓ 消費電力上がる
モーターの絶縁耐圧・絶縁試験
絶縁抵抗とは電気が流れて欲しくない箇所の抵抗の事です。この絶縁抵抗値の単位はMΩで表しますが、この値が小さくなると漏電や感電などの危険が増します。絶縁抵抗値は、周囲の湿度環境や汚れなどで、長年モーターを使い続けていると落ちてきます。絶縁抵抗値が落ちた際に、測定部分を乾燥させると値が戻る場合があります。
絶縁耐圧試験
モーターメーカーは出荷前に耐電圧試験と絶縁抵抗試験の2つを行います。200Vのような低電圧モーターには電圧の2倍+1000Vを掛けても大丈夫かを確認します。2回目の耐電圧試験を行う場合は、初回電圧の80%にします。
絶縁抵抗試験
絶縁抵抗○Ω以上でモーターを合格するというのは各自メーカーが基準を持ちます。
例)DC500Vで10MΩ以上で合格など

モーターの導通検査・絶縁チェック
モーターの性能を計る試験として、モーター内で電気が繋がっているか、導通しているかを確認する導通検査と、モーターの絶縁をチェックする絶縁試験の2つがあります。
導通をチェックしたい場合はテスターと呼ばれるものを使います。電気が導通しているか確認したい場所にリード棒を接触させ、そこにDC10Vなどの低電圧を掛け、抵抗0Ω(つまり導通している)に針が振れればチェックできます。
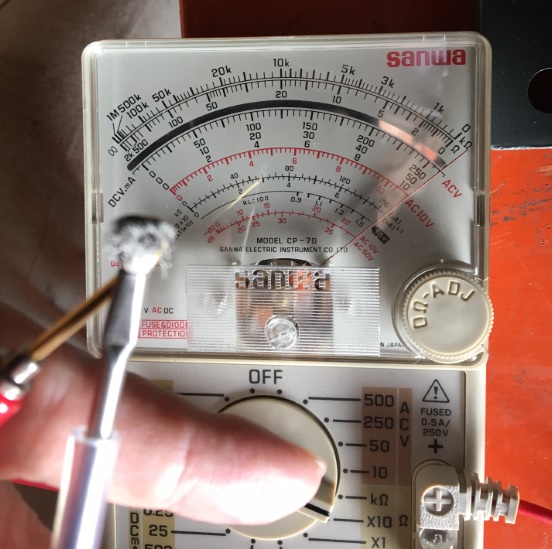
絶縁をチェックしたい場合は、絶縁抵抗計を使います。例えば測りたい箇所にDC500Vを掛けて、針が∞Ω(つまち導通していない)を指したまま動かなければ、絶縁抵抗値が十分あるという事になります。

モーターの巻き線抵抗計
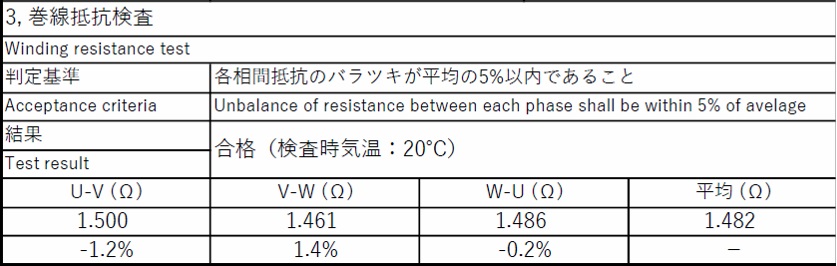
三相交流モーターにはそれぞれの巻き線の相関で抵抗値があります。これを巻き線抵抗値と言います。計測の仕方は抵抗計を使ってモーターケーブルの3本のうちに2本に端子をあてて抵抗値を計るだけです。
検査の合格基準は各相の抵抗のバラツキが平均の5%以内に収まっていることです。
なぜ三相交流モーターが広く使われているのか?
モーターには単相モーターと三相交流モーターがあり、広く使用されているのは三相交流モーターです。その理由には以下のようなものがあります。
・三相モーターの各相に流れる電流値は、単相モーターの電流値と比較すると約60%以下になるため、結果として三相モーターではより高いkw数のモーターを使用する事ができる
・三相モーターは一般的に単相モーターよりも効率が良い
・三相交流モーターは単相誘導モーターよりも始動が簡単である
防爆について
日本の防爆は以下の3つに分けられます。欧州の規格はATEXです。
耐圧防爆・・内部爆発を起こしても容器が爆発を抑え込む構造
爆発等級 d1<0.4mm d2 0.4~0.6mm d3 0.6<
ガス等級(℃) G1/450~ G2/ 300~450℃ G3/200~300 G4/135~200 G5/100~135 G6/85~100
安全増防爆・・運転時に火花などの高温部が発生しにくいような構造
IP保護等級について
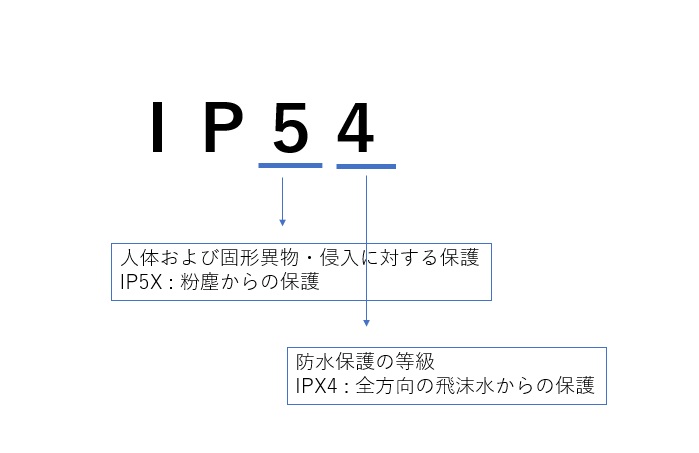
※数値は上がるにつれて保護レベルは上がっていく
ULマーク2種類について
UL規格はアメリカのUL社が策定する製品安全規格の事です。取得は任意ですがアメリカ向けの輸出に際しては必要になります。
UL規格取得を表すULマークについては2種類あります。
レコグニションマーク
ある機械のいち部品(他の何かと組み合わせる事で機能する部品)に使用されるマーク。下記の写真ではキャンドポンプのモーターに使用されています。


リスティングマーク
完成品や一般販売される部品に使用されるマーク。下記の写真ではインバーター本体に使用。


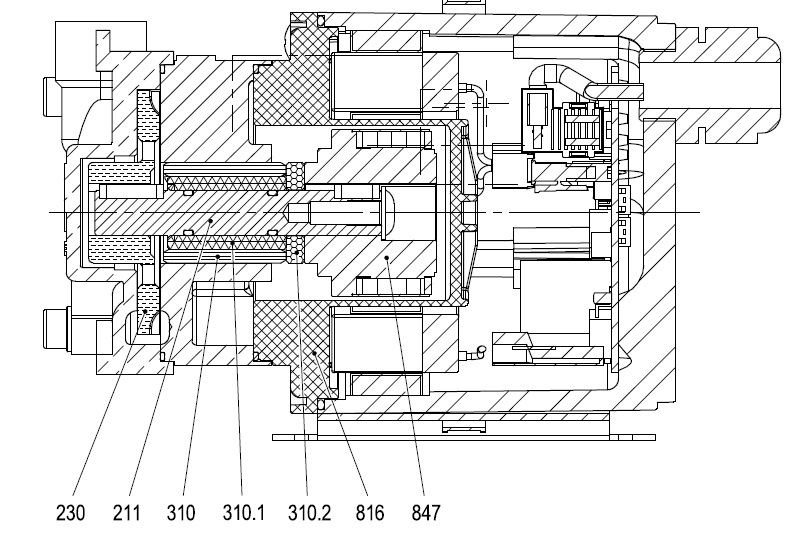
DC電源(24V)・マグネットポンプ
通常DCモーターを使用したスペックポンプはモーター内部にポンプヘッドの内部マグネットが入り込んだ構造で駆動させるため、媒体の熱がモーターに直接影響するために熱に弱く、媒体温度も最高80℃程度が限界でした。
しかし昨今では自動車やトラックを中心にDC電源でポンプを使う用途などが出始めた事に対応し、スペックポンプではマグネットカップリング型のDCモーターポンプを開発しました。ポンプヘッドとモーター部がマグネットカップリングで分けられるためモーターに対する媒体熱の影響も抑えられ、DCモーターポンプに関わらず、最高200℃までの媒体使用に耐えられるポンプです。
マグネットカプリング型DCモーターポンプ Y-2951W-MK


通常のDCモーターポンプの断面図
モーター極数とトルク
極数とはモーターに永久磁石が何対あるのかという事です。1対ならば2極、2対ならば4極、3対ならば6極です。極数が増えるほどモーターは大きな力(トルク)を出すことができますので、モーター負荷が大きいときに使用します。
回転数=120x周波数(Hz)/ 極数
上記の式で現わされるように、極数が増えるとモーターの回転数は下がります。
例えばスペックのモータで見てみると、誘導モーターは2極モーター、PMモーターは6極モーターです。
【誘導モーター 2極】 トルクは小さいですが、始動時の回転は速いです。言い換えれば、加速は速いがパワーがないのが2極モーターです。
【PMモーター 6極】始動時の加速はゆっくりですが、トルクが大きいです。
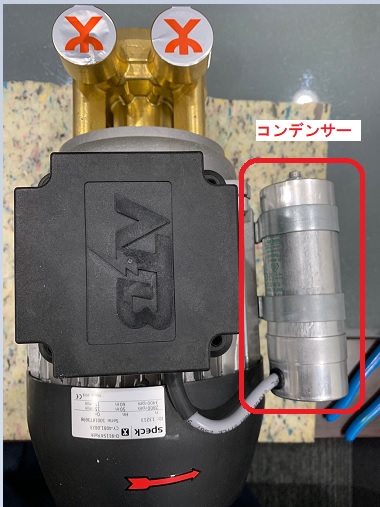
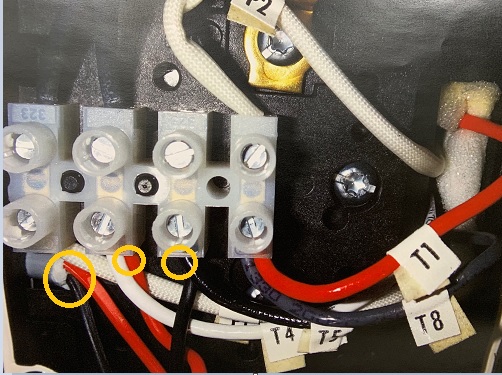
単相ACモーターとコンデンサー
単相ACモーターにはコンデンサーが付いています。コンデンサーが無いと単相モーターは回転方向を決められません。コンデンサーを付ける事で単相から二相にし、モーターを回転させます。ACコンデンサーには極性がないため(ある瞬間は+である瞬間はマイナス)、その配線は(下記の黄色丸)入れ替わっても良い。
基本的に単相モーターは線が2本で、三相モーターは線が3本です。
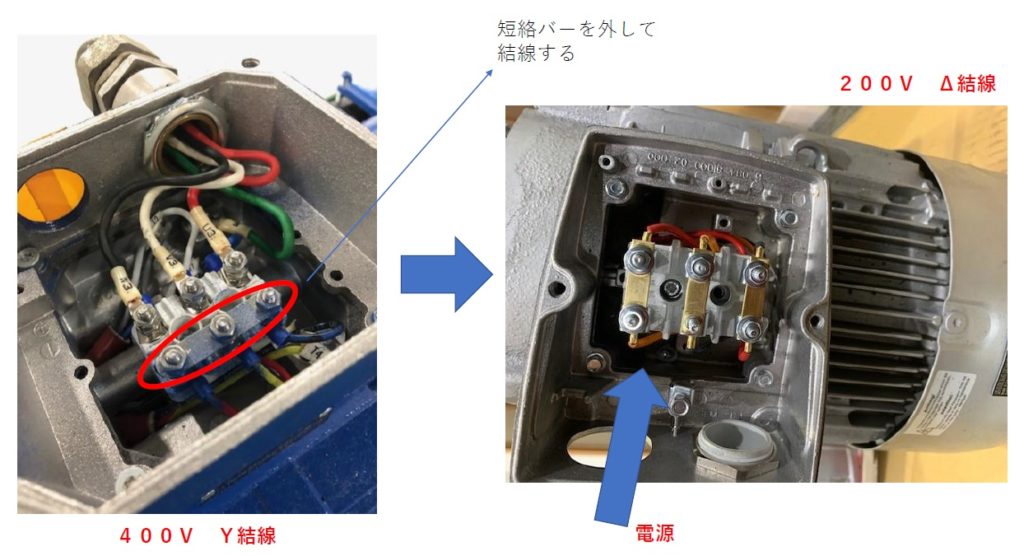
使用主電源とモーター端子の配線が違う
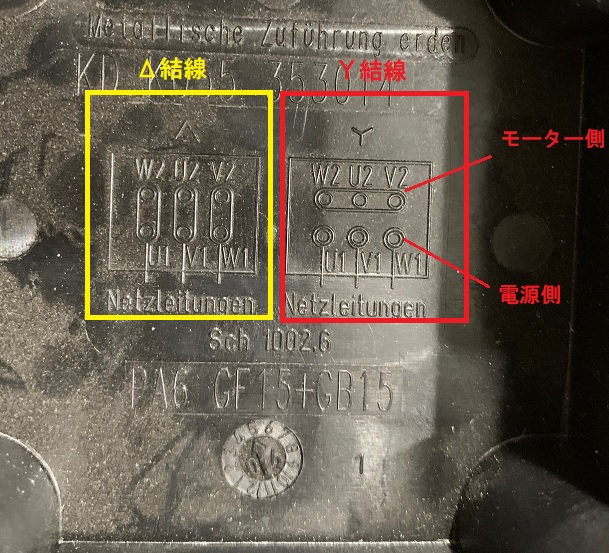
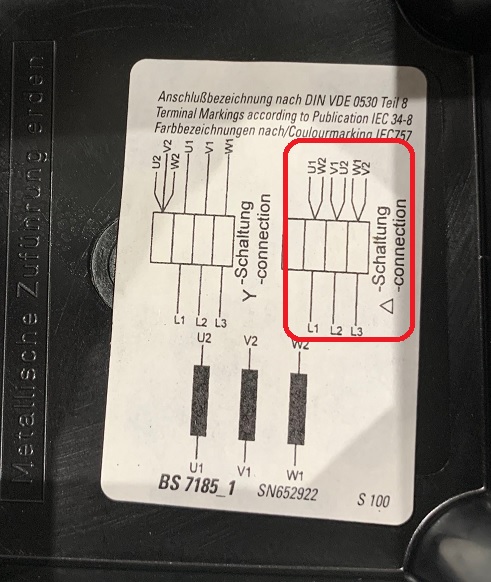
日本国内では200V使用もあれば400V使用もあります。スペックモーター自体は200V・400Vのどちらでも使用できる共用モーターを使っていますが、モーター端子の配線は200V使用ならばΔ結線に、400V使用ならばY結線にする必要があります。
400V使用のY結線は左の図のように短絡バーが横にかかっています。これを200VのΔ結線にするにはY結線の短絡バーを取り除いてΔ結線に変えます。
この使用電源と端子結線が違うとモーター損傷に繋がりますので、間違えずに結線する必要があります。
Y結線とΔ結線の例①
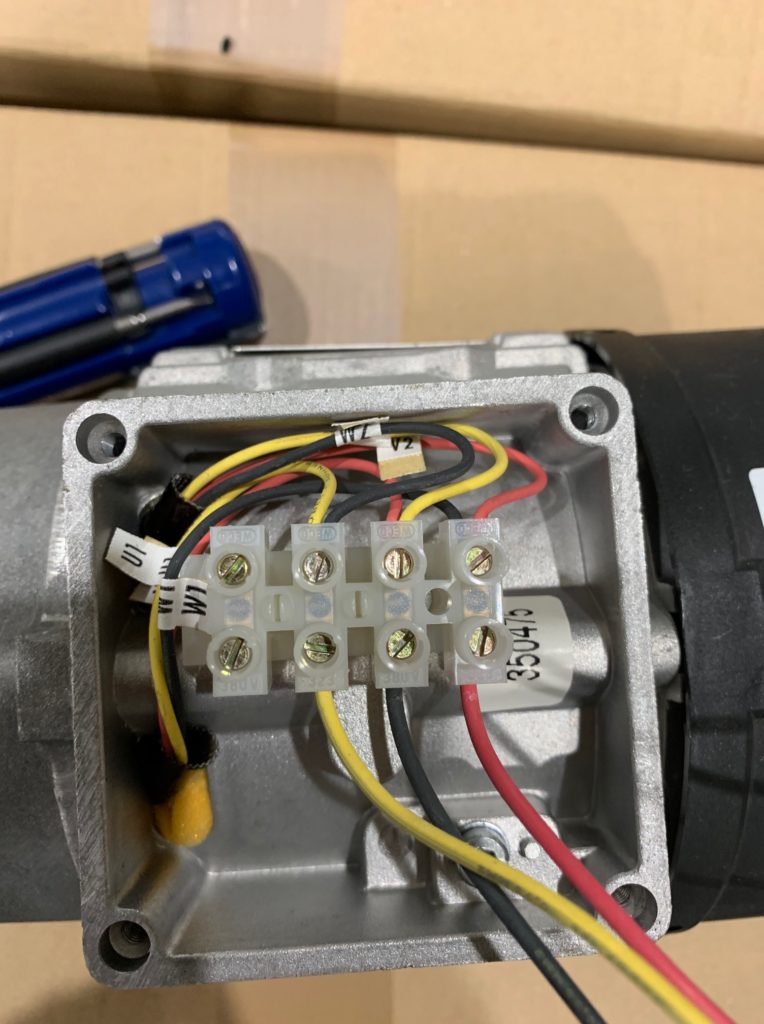
Δ結線の例②
モーターの使用電圧範囲
モーターには使用可能な電圧の範囲があります。例えば下記の3相誘導モーターの電圧範囲は50H使用で見るとΔ結線で200~240V、Y結線で346~420Vの範囲で使用可能なモーターになります。

世界の電圧範囲
また国別によって使用する周波数帯と使用電圧は下記のように変わってきます。
同じ単相、三相でも微妙に使用電圧が異なっているのが分かると思います。
日本 50/60Hz : 単相100/200V 三相200V
アメリカ 60Hz:単相115/230V 三相230V
韓国 60Hz : 単相220V 三相200/220/380V
中国 50Hz : 単相220V 三相380V
台湾 60Hz : 単相110/220V 三相220/380V
インド 50Hz : 単相230/240V 三相400/415V
ドイツ 50Hz : 単相230V 三相400V
モーターの許容電圧範囲は定格電圧の+-10%と言われています。しかしこの許容範囲はあくまで短時間の変動であれば問題ない範囲になりますので連続的に問題ないという範囲ではありません。あくまでモーター銘板に記載されている電圧範囲で使用する必要があります。
・モーターの電圧範囲よりも高い過電圧で使えば、電流値は下がりますがモーター自体に負荷が掛かりモーターが過熱します。
・逆にモーター電圧範囲よりも低い低電圧で使えば、電流値は上がりますのでやはりモーターの過熱を引き起こします。
例えばこちらの小型モーターですが単相230V使用のモーターになります。+-10%の電圧範囲で考えれば 207~252Vの許容電圧範囲になります。

日本の電圧範囲は単相200Vですので、
このモータの電圧範囲207~252Vの外になりますので使用できない事になります。
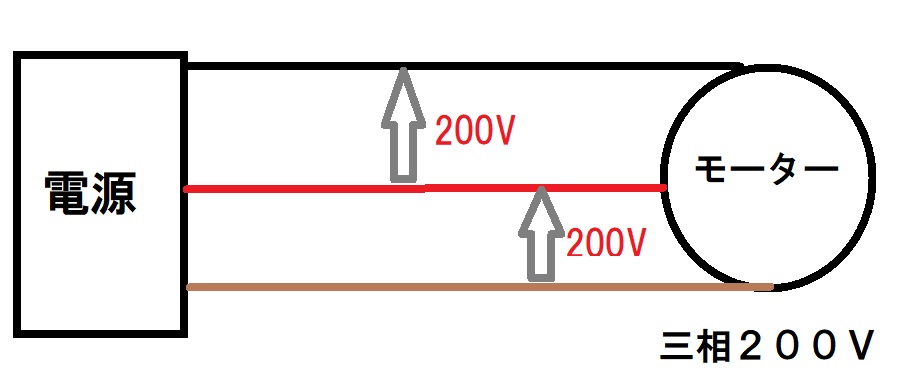
単相と三相の違い
電気を送電する方法には単相と三相があります。これに対してモーターにも単相モーターと三相モーターの2つがあります。
単相は家庭電化製品のような比較的に小さい製品に電気を送る方法で、三相は工場などに使用される大きい製品に電気を送る方法です。単相のケーブルの数は2本、三相のケーブルの数は3本です。
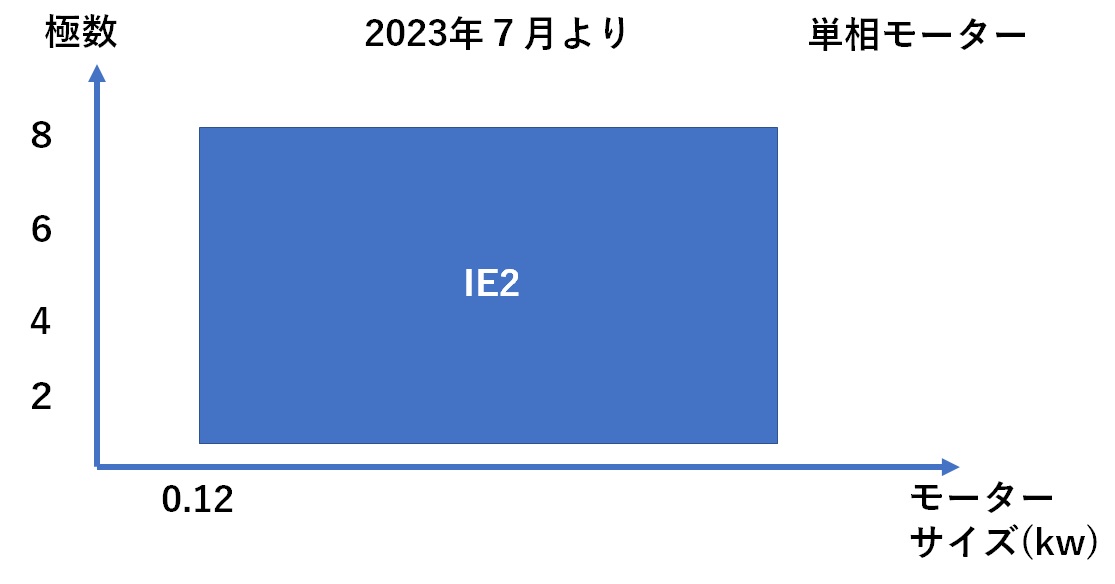
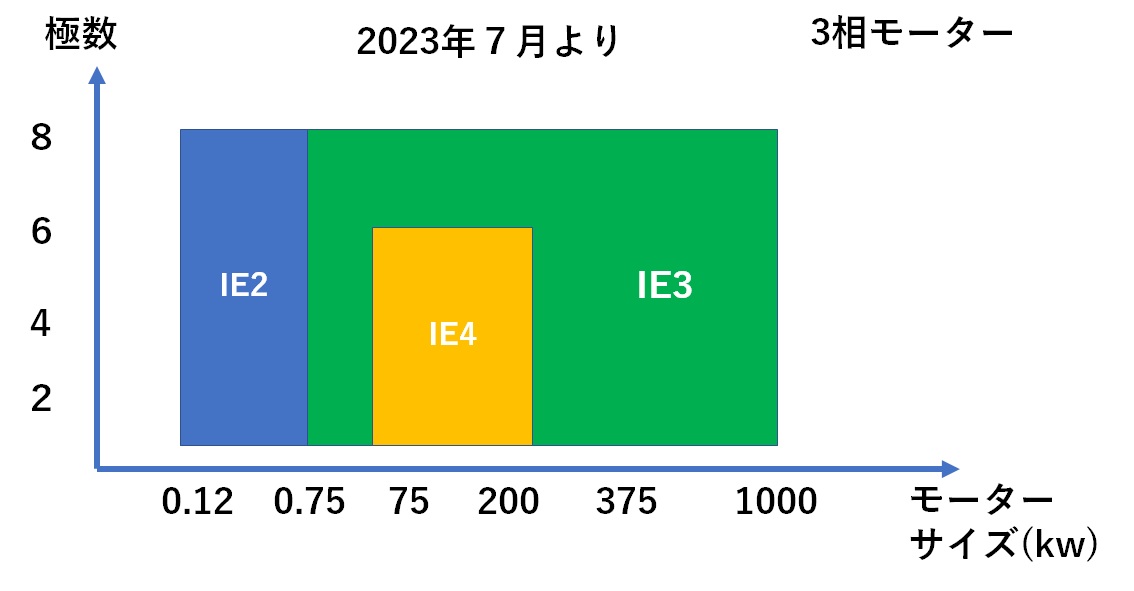
EUモーター高効率規制 2023年7月~
全世界におけるモーターの総消費電力量は莫大な数値になるため、省エネを目的としたモーターの高効率化はここ10年で盛んに行われてきています。
下記は2023年7月から始まる単相・三相モーターのモーター高効率化についてを示しています。 EU モーター高効率規格 commission regulation
目次
インバーターに対するブレーカーの選定方法
【電源】ー【ブレーカー】-【インバーター】ー【ポンプ】の順に接続します。インバーターにはInputの定格電流値とOutputの定格電流値の2つがありますが、ブレーカーの選定をする際はインバーターInput定格電流値を基準に選定します。
スペックPMモーターポンプの自動回転数減速機能
インバーターにはモーターが定格電流値を超えた場合の保護機能(アラーム設定)などがありますが、スペックPMモーターはモーターが回転数を上げて定格電流値を超えようとすると、インバーターが定格電流値を超えないように自動的に減速する機能が付いています。これにより、モーターが定格を超えて焼損するというトラブルを事前に防ぎます。
PMモーター設定/誘導モーター設定
スペックポンプ使用のVacon社製インバーターはPMモーター・誘導モーターの両モーターに使用できますが、その切り替え方法はパラメーター設定で行います。インバーターの機種によっては誘導モーター専用のインバーター、PMモーター専用のインバーターとありますので確認が必要です。
Vaconインバーターの基本動作(ローカル制御:VFDキーパッド上)
まずは【基本の電源→インバーター→ポンプ】の接続についてです。
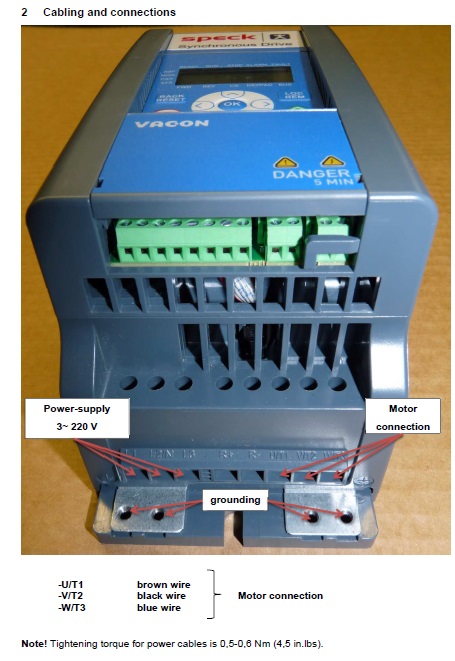
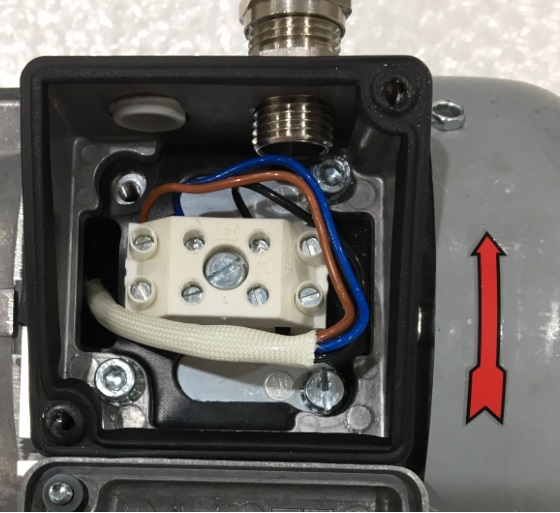
L1 L2 L3部に電源からのケーブルを接続します。 UVW部にはモーターに繋がるケーブルを繋ぎます。この時、スペックPMモーター上の端子内部では、U→茶色ケーブル V→黒色ケーブル W→青色ケーブルになるように接続する必要があります。
これがVaconインバーター上の操作ボタンです。
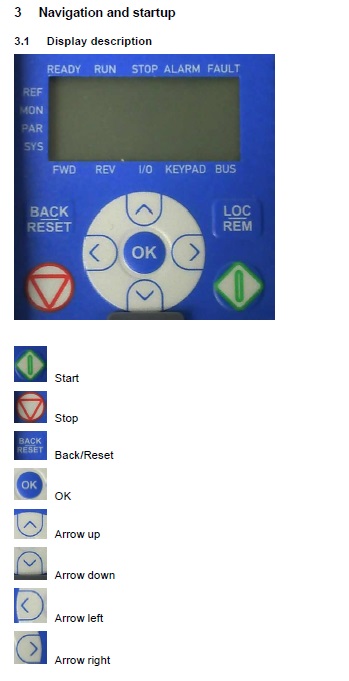
下記の緑ボタンでモーターがスタートし、赤色ボタンで停止します。
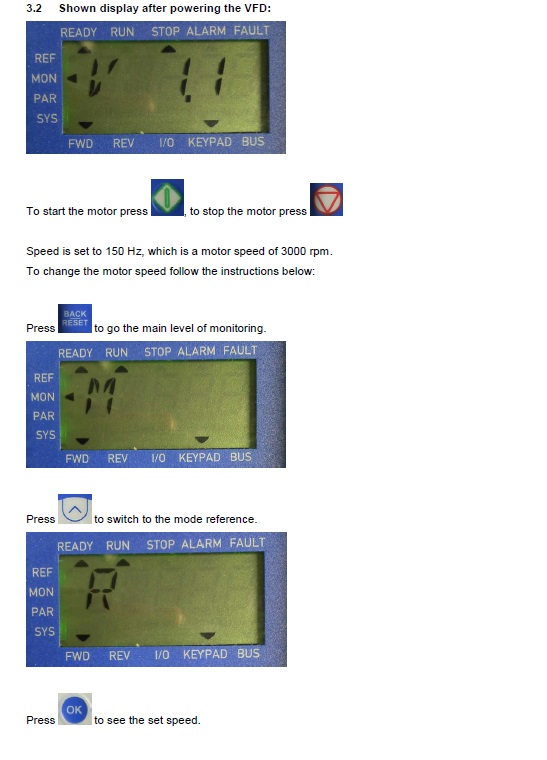
バックボタンを押すと、左のPAR(パラメーター)・MON(モニター)・REF(リファレンス)の各メニューを選ぶ事ができます。回転数(周波数)を変えたい場合は、REF(リファレンス)に↑ボタンで合わせて、周波数を大きくします。

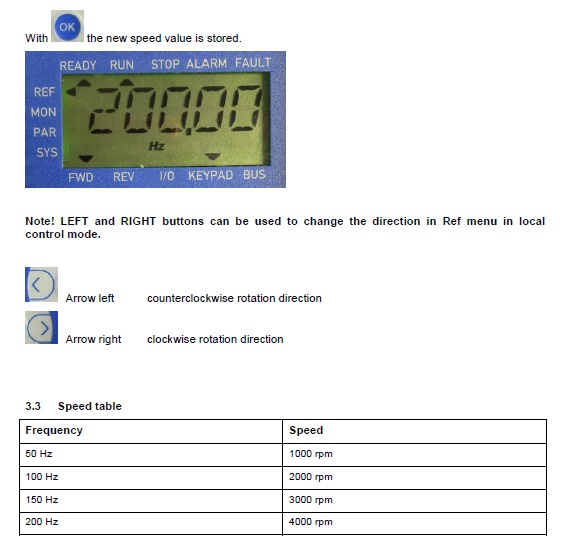
MON(モニター)メニューにカーソルを合わせると、現在のモーターのデータ(電圧・回転数・周波数など)が分かります。

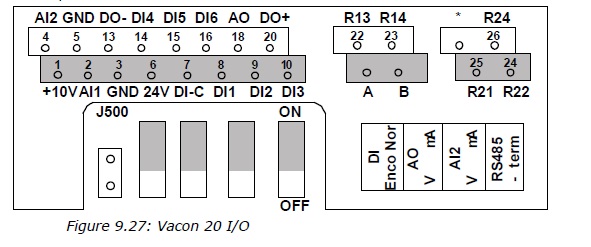
Vaconインバーター外部コントロール用の端子接続
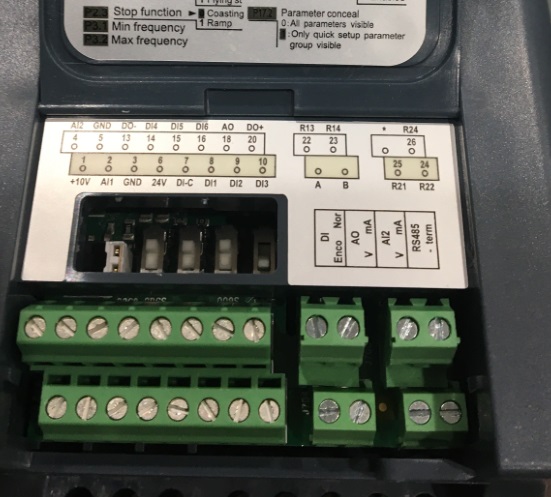
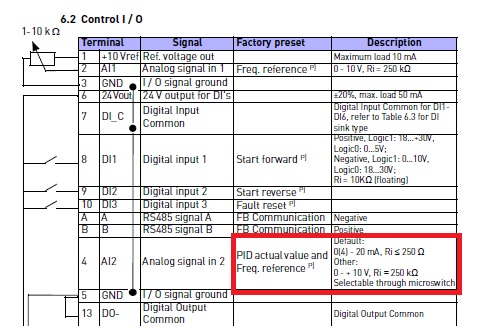
【デジタル入力】VFDにデジタル信号を送り起動する
■6番端子:24V電源 DI1用(最初のスタート)
■8番端子:DI1 正転スタート または 9番端子:DI2 逆転スタート
以上の6番端子、8番端子または9番端子には必ず端子接続します。これでIO制御でポンプをスタートさせる事ができます。
多段速設定をする場合は
14番 15番 16番の DI4 DI5 DI6 端子(デジタル入力)も使用します。
次は外部制御で周波数を変えるための端子についてです。
【アナログ入力】VFDにアナログ信号(0-20mA/0-10V)を送り回転数を変える
■4番端子:アナログ入力AI2 0-20mA / 0-10V
※AI2 アナログ入力をmA→Vに変えたい場合は下記のつまみを変える
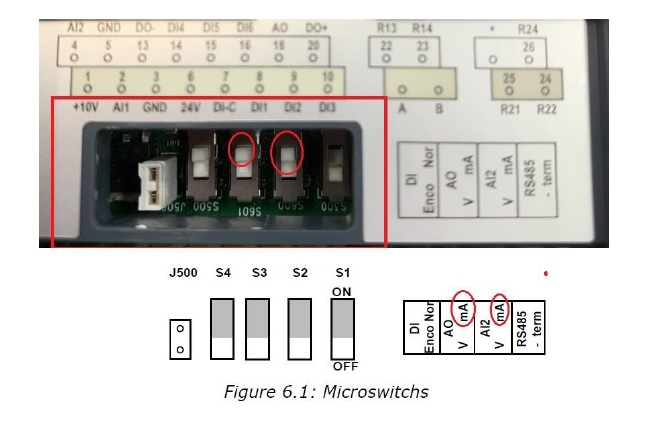
■5番端子: GND アース
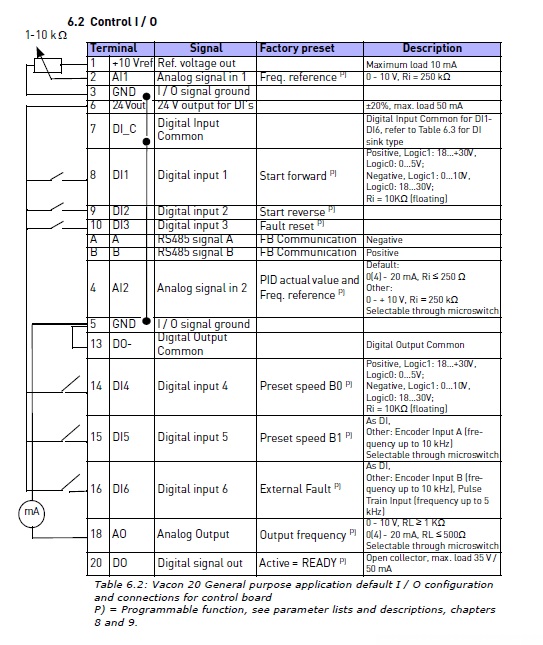
最後にエラー機能を起こすためのリレー端子です。
【リレー出力】VFDの保護機能が動作し、出力を停止するための端子
■25番端子:R21(リレーアウト)
■24番端子:R22(リレーアウト)
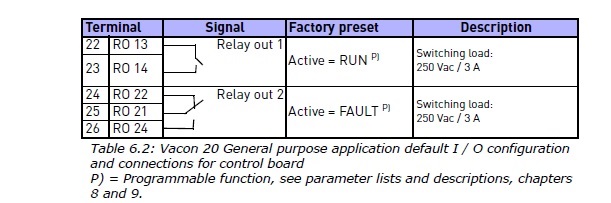
【a接点】 何か起こったら信号を送ってONにする 例)運転中に20Hzを超えたらRO1が接続しエラー表示を出す。20Hzを再び下回れば、接続は離れる。
![]()
【b接点】何か起こったら信号を送ってOFFにする 例)どこかのケーブルが抜けたら(接続が離れたら)エラーが出る
![]()
他にも下記のような端子があります
AO【アナログ出力】VFDからPLCにVFDの出力周波数などを送る
送信方法として、0-10V また 4-20mA があります。 ■モニター例 出力周波数・出力電流・出力電圧・負荷率・消費電力・速度回転数
DO【デジタル出力/ オープンコレクター】
メカニカル式のリレー出力ではチャタリング(摩耗)の誤作動が起きる場合がありますが、デジタル出力(オープンコレクタ)ではトランジスタを使用した出力になるためそのような問題が起こりません。デジタル出力/オープンコレクターにはDO-(シンクタイプ)とDO+ (ソースタイプ)があります。
■モニター例 周波数到達・パターン運転・低電流検出など
使用方法としては例えば運転周波数の監視などがあります。例えばVFDの周波数が50Hzを超えた時を監視してそれに応じてPLCを通じてチラーの冷却能力を落としたい場合、このデジタル出力(オープンコレクター)を使います。50Hzを超えたらチラー能力を落とすというようなやり方です。
下のP8.1パラメーターはデジタル出力つまりPLCに出力するための項目ですが
12=出力周波数の監視 を設定すれば、端子5=GND / 端子13=DO common を使用し
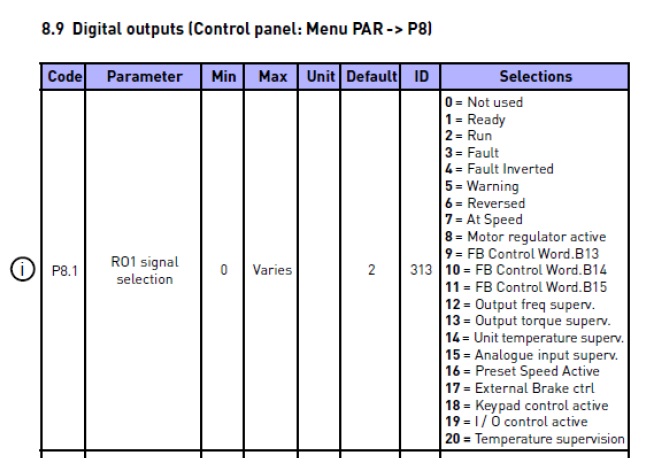
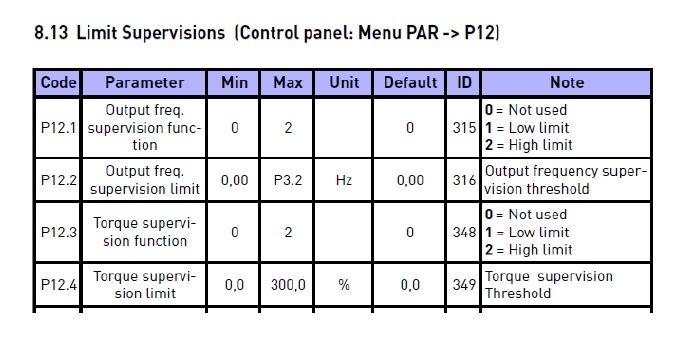
P12.1→ 2=上限 P12.2 → 50Hz で設定すれば 50Hzを周波数が超えた際に、VFDからデジタル出力を通してPLCに信号が送られる。
そして端子20 DO【デジタル出力/オープンコレクター】を使用する
Vaconインバーターのパラメーター説明
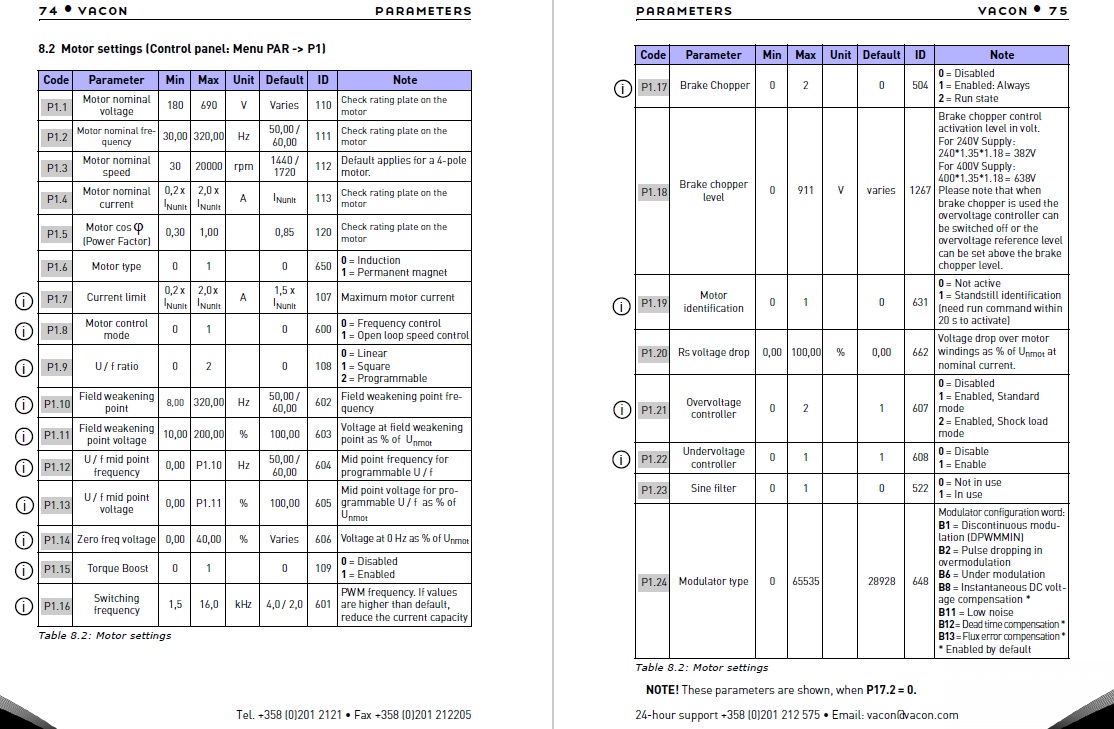
P1.X モーター設定
P1.Xパラメーターには、インバーターが動かすPMポンプのデータが入っています。定格電圧・定格電流・モーター力率・U/Fパターンなどモーターに必要な全ての情報がこのP1.Xパラメーターに入ります。スペックPMポンプの全てのパラメーター設定はドイツ工場出荷時に行われますので、基本はそこからパラメーター変更を行う事はありませんが、特にこのモーターデータに関するP1.Xについては変更せずに確認するに留めます。
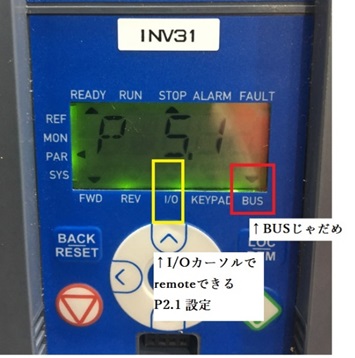
P2.X スタート/ストップ・ローカル/リモート制御
P3.X 周波数(回転数)設定
P2.Xはインバーターの制御をVFD本体(Local)で行うか、それとも離れた制御盤上で行うか(Remote)を設定するパラメーターです。P2.1 /P2.5のパラメーターでローカルモードかリモートモードかを選択します。例えば離れた制御盤(Remote)で運転したい場合は、P2.1=0(I/O) P2.5=0(Remote)にして、VFD上の画面もそのようになっているかを確認します。

P3.Xについては多段速設定(予め、数個の回転数(周波数)を設定しポンプを動かす制御)において使用します。P3.3=1(preset speed=0)とし、P3.4 preset speed0の回転数(周波数)を設定します。これだけで起動後にモーターはこのpreset speed0の回転数まで上がります。
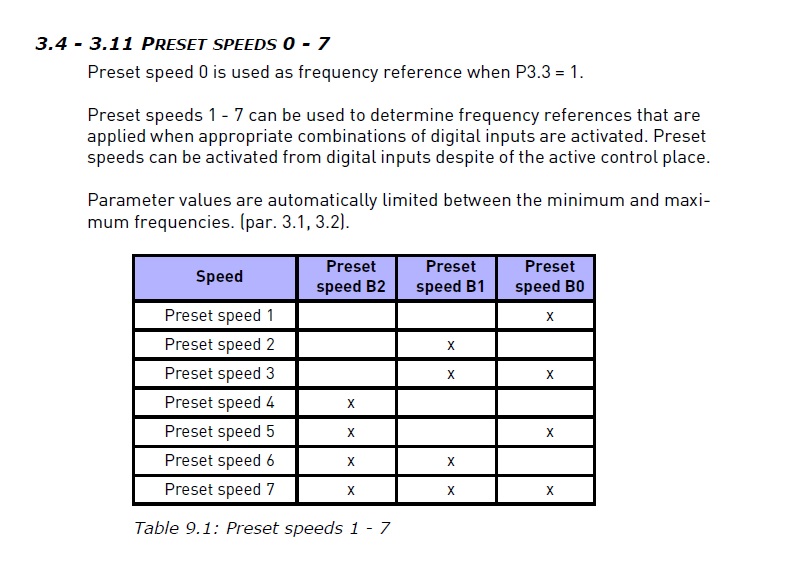
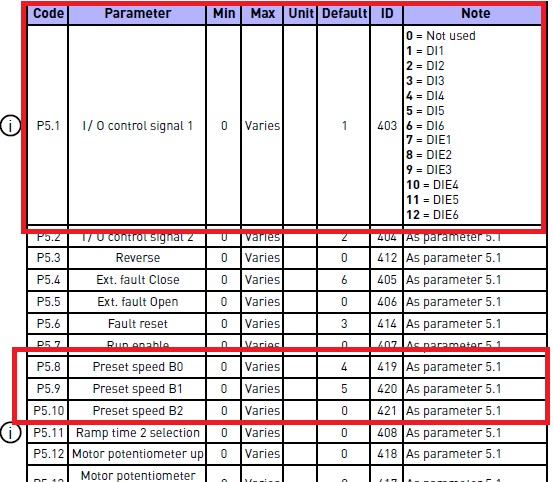
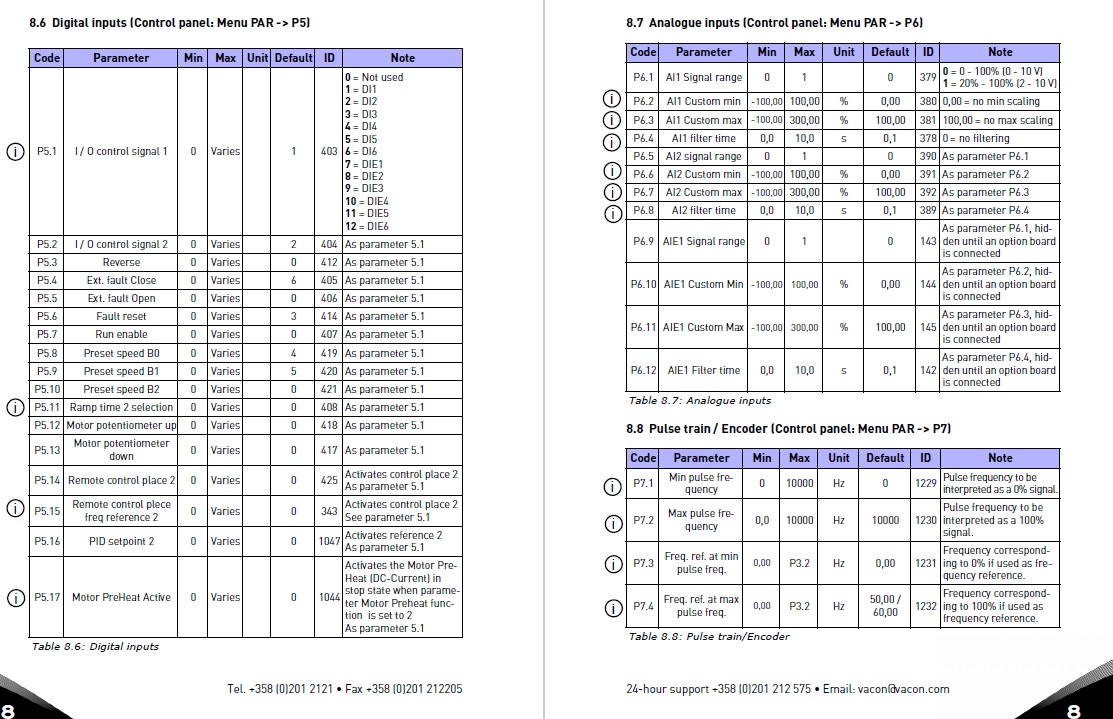
同じくP3.5~P3.11までpreset speed 1 ~ preset speed 7までの周波数を設定すれば、下図のP5.8 P5.9 P5.10 の設定においてそれぞれ下記のように端子を接続すれば、スピード0/1/2の3段階の回転数を設定する事ができます。
P5.1はデジタル入力の割り振りとなり、1=DI1にすればP3.4で決めたpreset speed0までモーターは回転数を上げる。
P5.8 preset speed B0=4(DI4)
P5.9 preset speed B1=5(DI5)
P5.10 preset speed B2=6(DI6)
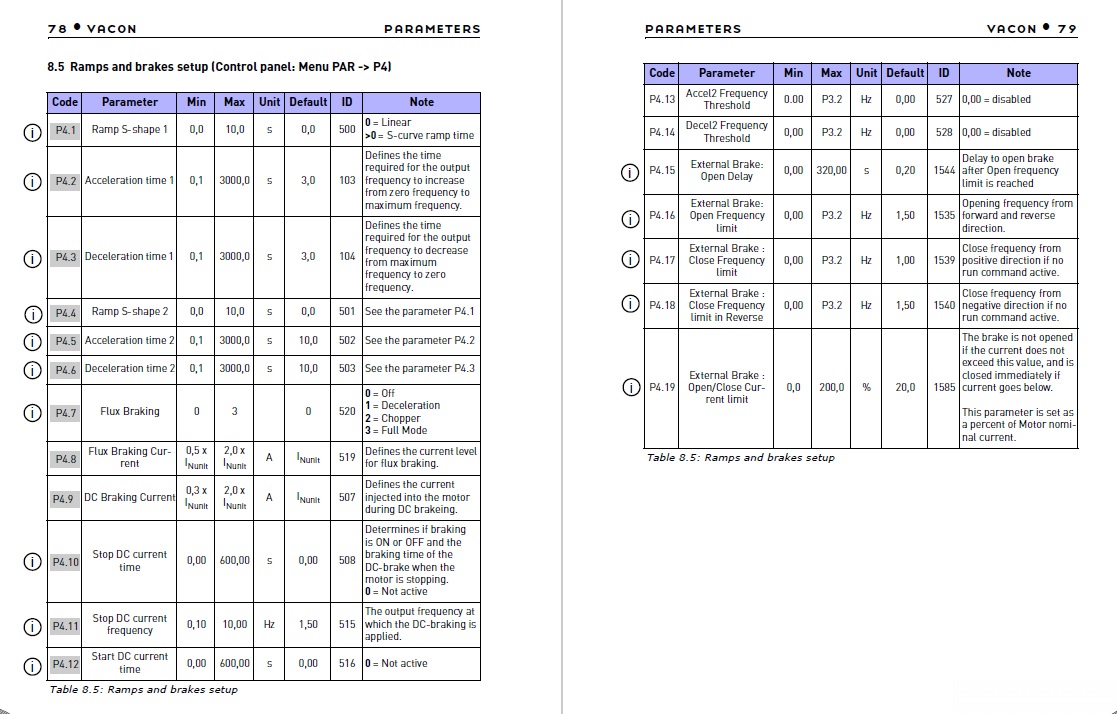
P4.X 加速/減速時間
インバーターでは到達回転数までの時間を設定することができます(パラメーターP4.2)。これは粘度が高い媒体などを扱う場合に、時間をかけて徐々に回転数を上げる事で、モーターへの負荷を抑えることが目的です。しかし、あまりにも長い加速時間を取るとエラーが起こる場合もあるので注意が必要です。
P5.X 多段速スピード設定
上記でも述べた多段速設定を行う場合に、P5.Xパラメーターを使います。あらかじめ設定した周波数を最大8個用意することができます。
P13.X 保護機能
P13.Xはモーターの保護機能です。スペックPMモーターは定格電流値を超えようとすると、自動的に減速し電流値を下げる設定になっていますので、通常のインバーター-誘導モーターで使われるようなストール保護機能は必要ありません。
試験的にアラーム機能を出したいという場合は
P13.5 アラーム設定を1(警告出し)
P13.11 ストール保護電流値(ストール保護機能が作動する電流値)
P13.12 ストール時間(何秒以上でストールが掛かるか)
P13.13 ストール周波数(ストールが作動する最低周波数)
以上の4つをセットします。

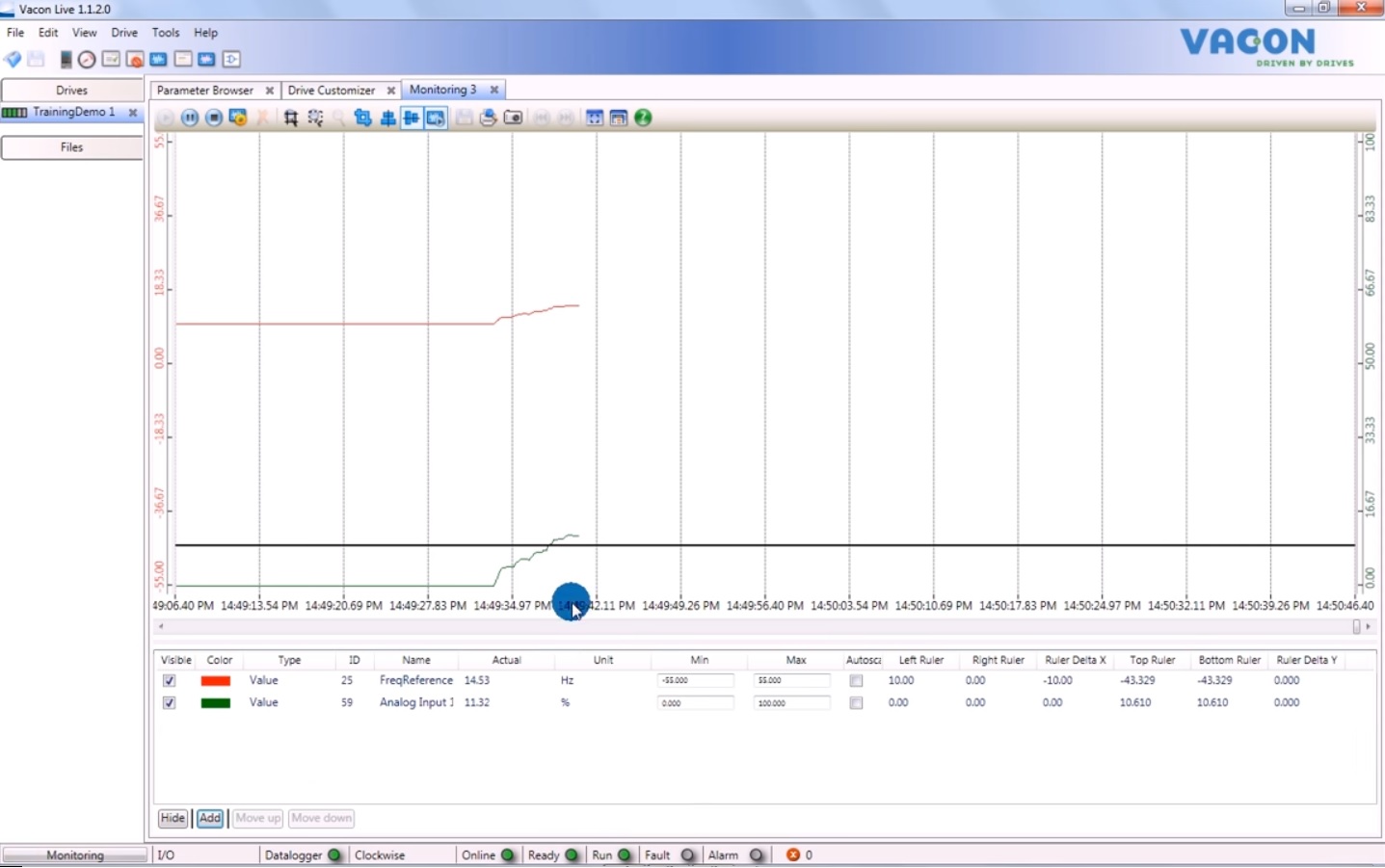
Vacon Live モニタリングメニュー
PC上のVFDパラメーター設定ツールであるVacon LiveではモニタリングメニューがありVFDと接続している稼動ポンプの回転数や電流値などをリアルタイムで記録することができます。
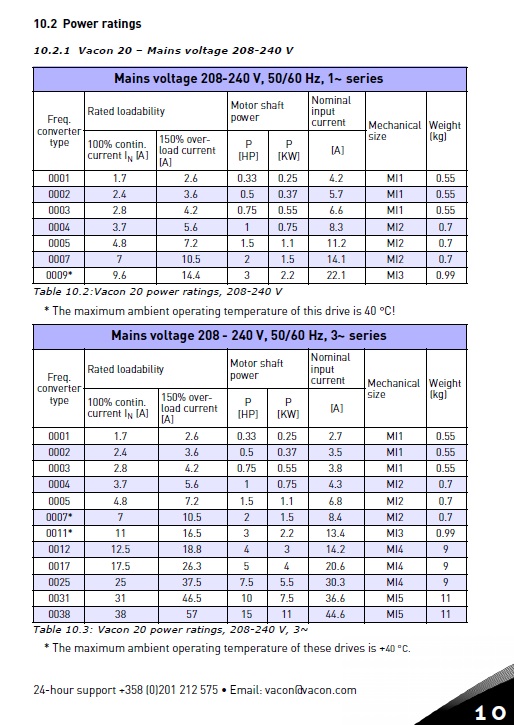
インバーターサイズ
インバーターの制御方法
①インバーター本体の操作パネルで制御する方法
② インバーターの制御端子に配線して外部の制御パネルで運転する外部運転モード
インバーター内蔵のPID制御機能を使った運転
③ PLCやVFDをRS-485通信 / オプション基盤装着 でネットワーク構築し制御
※PLCとは自動的に外部の機器を制御できる機器のことを言います。シーケンサはPLCの別称です。PLCはコンピューターのようなもので自動的に運転させるプログラムを書き込めます。
※RS485やオプション基盤とはネットワーク通信の事を指し、PLCやVFDなどの機器を1つのネットワークにして制御させます
※インバーターにはPID制御が内臓されており、運転状況により速度、圧力、流量などを制御できる簡易な自動プログラムが使えるようになっている
【スペックポンプ VFDカタログマニュアル ダウンロード】

